基于液压测高度的飞行器、飞行高度检测方法、降落方法与流程
本发明涉及距离测量,尤其涉及一种基于液压测高度的飞行器、飞行高度检测方法、降落方法。
背景技术:
1、当使用无人机作为移动的测量平台时,需要知道其自身的空间三维位置。无人机离地面的高度信息可以通过不同的方法获得,例如可以使用北斗等卫星定位系统,或者在无人机上安装激光雷达、毫米波雷达,通过接收地面反射的电磁波信息判断距离,还可以在无人机上安装气压计,通过大气压强的大小来判断无人机高度。
2、但是基于上述方法测量无人机的飞行高度都存在一定的条件限制,在某些情况下,会无法得到无人机的高度或者存在较大的测量误差。
3、卫星定位系统可能因为卫星信号弱或者电磁干扰而解算不出正确的位置,无人机上的激光雷达和毫米波雷达要通过回波信息计算距离,会因为无人机的倾斜和地面上的高低起伏而产生误差,气压计通过测量大气压强来得到高度信息,则会因为空气温度和湿度的不同而导致测量误差。
4、因此,亟需提供一种基于液压测高度的飞行器、飞行高度检测方法、降落方法,能够准确计算飞行器的飞行高度。
5、在所述背景技术部分公开的上述信息仅用于加强对本申请的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明主要目的是克服飞行器的飞行高度测量不精确的问题,提供一种基于液压测高度的飞行器、飞行高度检测方法、降落方法,能够准确计算飞行器的飞行高度。
2、为实现上述的目的,本发明第一方面提供了一种基于液压测高度的飞行器,包括:飞行器主体、信号处理器、信号传输线、软管、液体和液压传感器;
3、所述信号处理器固定在飞行器主体上;
4、所述信号处理器与液压传感器通过信号传输线连接,用于根据液压传感器检测的压强计算飞行器主体与地面的距离;
5、所述软管包括第一端和第二端,其第一端与飞行器主体固定连接,液压传感器设置在软管的第二端,软管内部盛有液体,该液压传感器检测所述液体的压强;所述软管的长度大于飞行器的飞行高度。
6、根据本发明一示例实施方式,所述液体包括水或汞。
7、作为本发明的第二个方面,本发明提供了一种飞行器的飞行高度检测方法,采用所述的基于液压测高度的飞行器;包括以下步骤:
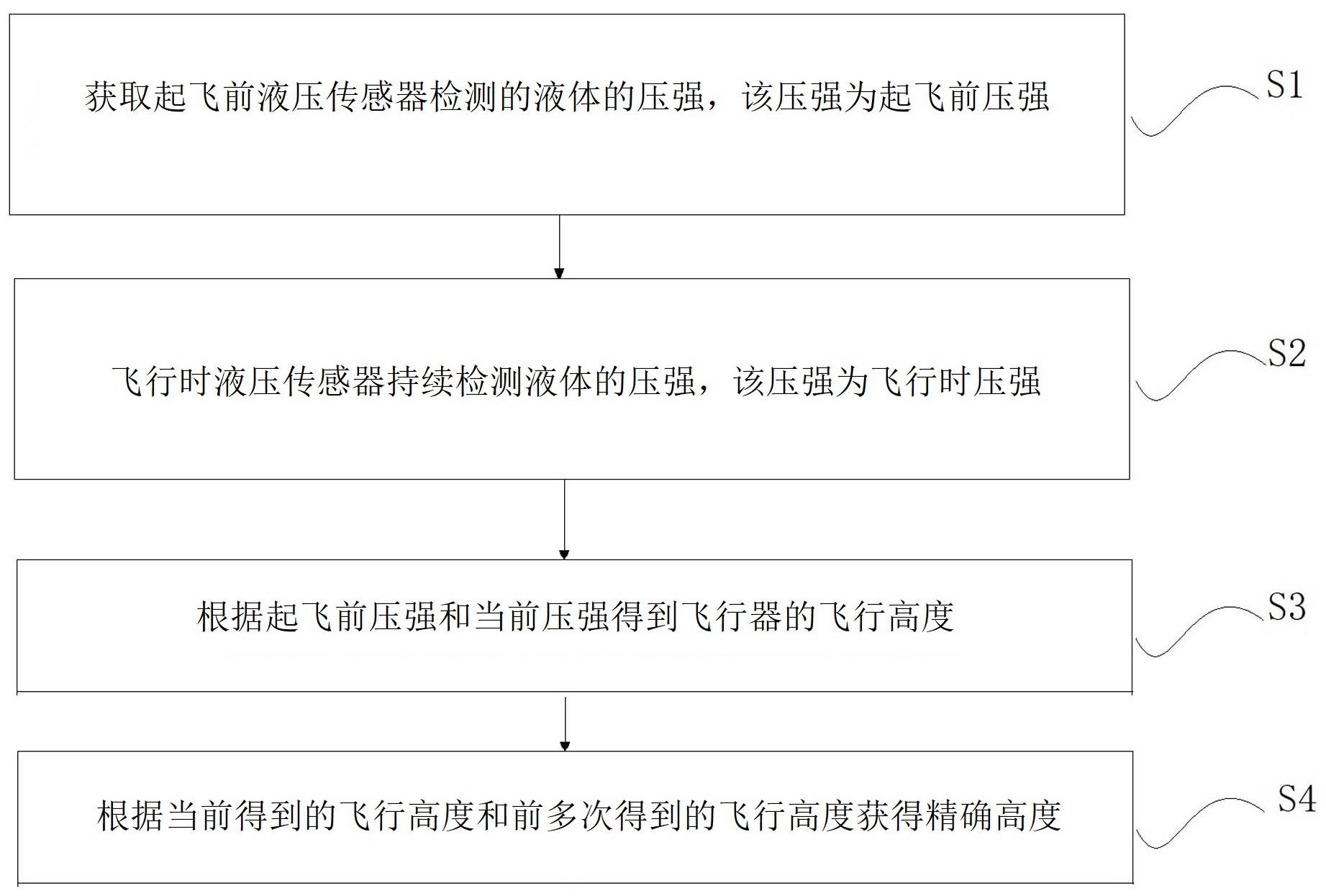
8、获取起飞前液压传感器检测的液体的压强,该压强为起飞前压强;
9、飞行时液压传感器持续检测液体的压强,该压强为飞行时压强;
10、根据起飞前压强和当前压强得到飞行器的飞行高度。
11、根据本发明一示例实施方式,所述飞行时液压传感器持续检测液体的压强的方法包括:每隔一帧检测一次飞行时压强。
12、根据本发明一示例实施方式,所述根据起飞前压强和当前压强得到飞行器的飞行高度的方法采用公式1:
13、 公式1;
14、其中,h表示飞行高度,单位为m;h1表示起飞前液面高度,单位为m;h2表示飞行时液面高度,单位为m;g为重力加速度,取9.8,单位为n/kg;为液体密度,单位为kg/m3;p1表示起飞前压强,单位为pa;p2表示飞行时压强单位为pa。
15、根据本发明一示例实施方式,根据起飞前压强和当前压强得到飞行器的飞行高度之后还包括:根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度。
16、根据本发明一示例实施方式,所述根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度的方法还包括:通过平滑降噪的方法根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度。
17、根据本发明一示例实施方式,所述通过平滑降噪的方法根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度的方法采用公式2或公式3:
18、h_out(t)= alpha0×h(t)+ alpha1×h(t-1)+ alpha2×h(t-2) 公式2;
19、h_out(t)=alpha0×h(t)+ alpha1×h(t-1)+ alpha2×h(t-2)+ alpha3×h(t-3) 公式3;
20、其中,h_out(t)表示精确高度,h(t)表示当前飞行高度,h(t-1)表示上一次飞行高度,h(t-2)表示上上一次飞行高度,h(t-3)表示上上上一次飞行高度,alpha0、 alpha1、alpha2、alpha3均为常数。
21、作为本发明的第三个方面,本发明提供了一种飞行器的降落方法,包括以下步骤:
22、采用所述的飞行器的飞行高度检测方法检测飞行器的飞行高度;
23、根据飞行器的高度调整飞行器的降落速度。
24、根据本发明一示例实施方式,所述根据飞行器的高度调整飞行器的降落速度的方法包括:
25、飞行高度大于指定高度时,飞行器按照指定速度下降,该指定速度大于3m/s;
26、否则,飞行器减小至0-3m/s下降。
27、本发明的优势效果是,本发明的测量原理和气压计类似,但不是通过测量大气压强计算高度,而是通过测量液体压强计算高度。
28、压强和密度成正比,而液体的密度远大于空气,在相同高度差的情况下,液体带来的压强差要源大于气体的压强差,因此理论上使用液压测量高度得精度比气压更高。而且液体相对气体,不容易受环境温度和湿度的影响,测量稳定性更好。
技术特征:
1.一种基于液压测高度的飞行器,其特征在于,包括:飞行器主体、信号处理器、信号传输线、软管、液体和液压传感器;
2.根据权利要求1所述的基于液压测高度的飞行器,其特征在于,所述液体包括水或汞。
3.一种飞行器的飞行高度检测方法,其特征在于,采用权利要求1或2中任一项所述的基于液压测高度的飞行器;包括以下步骤:
4.根据权利要求3所述的飞行器的飞行高度检测方法,其特征在于,所述飞行时液压传感器持续检测液体的压强的方法包括:每隔一帧检测一次飞行时压强。
5.根据权利要求4所述的飞行器的飞行高度检测方法,其特征在于,所述根据起飞前压强和当前压强得到飞行器的飞行高度的方法采用公式1:
6.根据权利要求4所述的飞行器的飞行高度检测方法,其特征在于,根据起飞前压强和当前压强得到飞行器的飞行高度之后还包括:根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度。
7.根据权利要求6所述的飞行器的飞行高度检测方法,其特征在于,所述根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度的方法还包括:通过平滑降噪的方法根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度。
8.根据权利要求7所述的飞行器的飞行高度检测方法,其特征在于,所述通过平滑降噪的方法根据当前得到的飞行高度和前多次得到的飞行高度获得精确高度的方法采用公式2或公式3:
9.一种飞行器的降落方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的飞行器的降落方法,其特征在于,所述根据飞行器的高度调整飞行器的降落速度的方法包括:
技术总结
本发明涉及距离测量技术领域,提供一种基于液压测高度的飞行器、飞行高度检测方法和降落方法,飞行器包括:飞行器主体、信号处理器、信号传输线、软管、液体和液压传感器;所述信号处理器固定在飞行器主体上;所述信号处理器与液压传感器通过信号传输线连接,用于根据液压传感器检测的压强计算飞行器主体与地面的距离;所述软管包括第一端和第二端,其第一端与飞行器主体固定连接,液压传感器设置在软管的第二端,软管内部盛有液体,该液压传感器检测所述液体的压强;所述软管的长度大于飞行器的飞行高度。本方案能够精确计算出飞行器的高度。
技术研发人员:曹动,张建南,杨罡,蒋智文,曹源源,冯五星,刘武
受保护的技术使用者:湖南科天健光电技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!