固体称量分选系统及方法与流程
本发明涉及实验室检测自动化,尤其涉及一种固体称量分选系统及方法。
背景技术:
1、在水质分析萃取、土壤分析称量等实验过程中,要完成样品分装、定量称重、注液密封、振荡提取等操作。各过程都有一定的参数要求,比如称重和注液的精度,振荡过程的时间和温度等等。
2、而现有的操作都是以人工为主,各过程步骤的设备可能具有一定的自动化能力,比如振荡器采用市购产品,通过设定温度和振荡时间,实现此过程的自动化。但是,要完成这些过程步骤,还是要大量的人工参与。
3、另外,不同的实验中,实验流程可能不尽相同,而随着实验室数字化的普及,人工操作过程中,要实时完成数据在数字系统中的录入。工作量大,效率低,而且易出错。
4、如果将实验过程中的各个单独的步骤过程都实现自动化,并将各步骤通过自动化设备串起来,实现操作过程和数据流的连续性,则可大大提高实验的效率并减少人工因素产生的误差。
技术实现思路
1、本发明的目的是为了解决上述问题,提供一种固体称量分选系统及方法,使用全自动机器人实现样品自动化称量、加液加盖、恒温振荡的所有环节衔接,可实现无人化的操作,减少重复的人工搬运。
2、本发明采取的技术方案是:
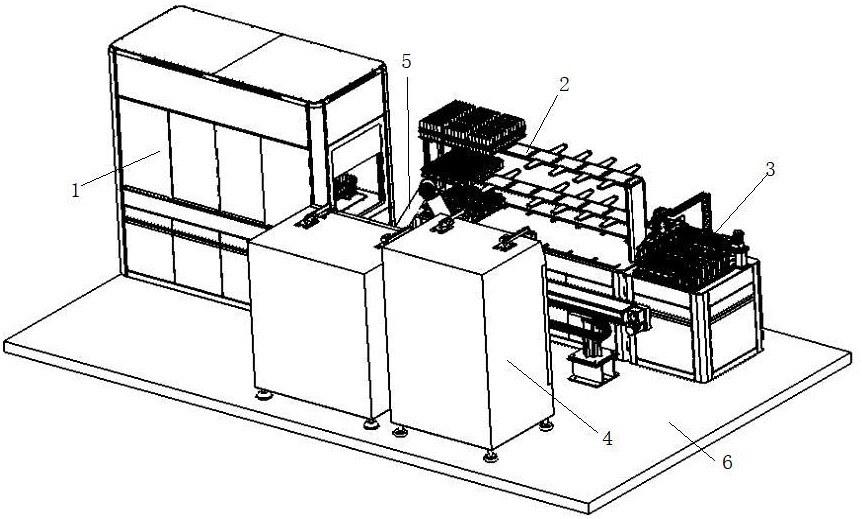
3、一种固体称量分选系统,其特征是,包括工作台面上设置的称重单元、料仓单元、注液单元、振荡单元和机器人单元,所述料仓单元和注液单元并排设置于机器人单元的前后一侧,所述振荡单元位于机器人单元的另一侧,所述称重单元位于机器人单元的左右一侧,所述料仓单元用于布置料盘,所述料盘用于放置容器,所述容器包含试管、试样瓶和坩埚中的至少一种,所述称重单元包括输入架、称量模块和输出架,所述输入架上布置有待测固体样品容器的料盘,所述输出架上布置有空容器的料盘,所述称量模块将固体样品定量称重于所述容器中,所述注液单元包括注液容器架、注液臂和瓶盖架,所述注液臂上安装有注液管和瓶盖吸头,注液管通过蠕动泵连接至试剂源,所述注液容器架用于放置料盘,所述注液臂通过升降伸入注液容器架料盘上的容器内进行注液,通过瓶盖吸头对容器进行合盖,所述机器人单元包括机器人和夹爪,所述夹爪用于抓取称重单元、料仓单元和注液单元的料盘,所述称重单元的输入架料盘上布置有样品容器,所述称量模块将样品定量称重至容器中,并将容器送至输出架的料盘;所述机器人单元将输出架的料盘搬运至料仓单元,或者机器人单元将输出架的料盘送至注液单元,注液单元对容器进行注液后,机器人单元将料盘送至振荡单元进行振荡,振荡完成后,再送回至料仓单元。
4、进一步,所述称重单元还包括设置于称量模块一侧的贴标模块,所述容器在称重前进行贴标。
5、进一步,所述称量模块包括天平、翻转直振器和夹爪机械臂,所述天平上设置有兼容支撑座,所述夹爪机械臂将样品容器送至翻转直振器上,将空容器送至兼容撑座上,所述翻转直振器将样品容器翻后直振,通过天平的称重反馈实现精确称量,所述兼容支撑座从下至上形成三层放置容器的阶梯,分别用于放置坩埚、进样瓶和试管。
6、进一步,所述机器人单元包括水平轨道,机器人安装在水平轨道上,所述水平轨道安装于工作台面上的支架上,所述水平轨道呈现左右方向布置,一端靠近所述称重单元,另一端位于注液单元的一侧。
7、进一步,所述机器人的夹爪包括电缸上设置的两个抓手,两个抓手在各自的轨道上位移形成夹持和松开,两个抓手上设置摩擦垫,位置对应于料盘的夹持边。
8、进一步,所述称重单元的输出架的一侧,设置废料架,所述输入架和输出架上均设置有多个料盘,所述输出架位于机器人单元一侧,开设输出口。
9、进一步,所述料仓单元上设置三层料盘架,三层料盘架分别布置试管料盘、进样瓶料盘和坩埚料盘,所述振荡单元包括两个振荡器,并排设置在机器人单元一侧,所述振荡器内设置料盘架,所述振荡器内保持恒温。
10、一种固体称量分选方法,应用上述的固体称量分选系统,其特征在于:分选过程中使用的容器为试管或坩埚,分选方法包括如下步骤:
11、(1)在称重单元的输入架上布置样品容器料盘;
12、(2)称量模块的夹爪机械臂分别从输入架和输出架上取出样品容器和空容器送至翻转直振器和兼容支撑架上;
13、(3)称量模块称取定量的样品,并将称量好的容器放回至输入架和输出架的料盘上;
14、(4)机器人单元将输出架上的料盘移动至料仓单元内;
15、(5)料仓单元满仓后,将料盘输出。
16、一种固体称量分选方法,应用上述的固体称量分选系统,其特征在于:分选过程中使用的容器为进样瓶,分选方法包括如下步骤:
17、(1)在称重单元的输入架上布置样品容器料盘;
18、(2)称量模块的夹爪机械臂分别从输入架和输出架上取出样品容器和空容器送至翻转直振器和兼容支撑架上;
19、(3)称量模块称取定量的样品,并将称量好的容器放回至输入架和输出架的料盘上;
20、(4)机器人单元将输出架上的料盘移动至注液单元的注液容器架上;
21、(5)所述注液单元对容器进行注液,并合盖;
22、(6)所述机器人单元将注液容器架上的料盘送至振荡单元进行振荡;
23、(7)振荡完成后,机器人单元将料盘移至料仓单元;
24、(8)料仓单元满仓后,将料盘输出。
25、进一步,所述步骤(6)中,当振荡单元处于振荡工作过程中时,所述机器人将注液容器架上的料盘先送至料仓单元,当振荡单元空闲时,再将未振荡操作的料盘送至振荡单元进行振荡操作。
26、本发明的有益效果是:
27、(1)将各实验过程步骤串联起来,实现全自动固体称量分选操作;
28、(2)减少人工搬运及实验操作,提高效率,并提高实验的准确性和安全性;
29、(3)自动将实验过程中进行数据的管理,使实验过程可追溯,确保数据安全性;
30、(4)实现多种实验过程的兼容,多种实验容器的兼容
31、(5)通过优化实验流程,充分提高各单元模块的工作效率。
技术特征:
1.一种固体称量分选系统,其特征在于:包括工作台面上设置的称重单元、料仓单元、注液单元、振荡单元和机器人单元,所述料仓单元和注液单元并排设置于机器人单元的前后一侧,所述振荡单元位于机器人单元的另一侧,所述称重单元位于机器人单元的左右一侧,所述料仓单元用于布置料盘,所述料盘用于放置容器,所述容器包含试管、试样瓶和坩埚中的至少一种,所述称重单元包括输入架、称量模块和输出架,所述输入架上布置有待测固体样品容器的料盘,所述输出架上布置有空容器的料盘,所述称量模块将固体样品定量称重于所述容器中,所述注液单元包括注液容器架、注液臂和瓶盖架,所述注液臂上安装有注液管和瓶盖吸头,注液管通过蠕动泵连接至试剂源,所述注液容器架用于放置料盘,所述注液臂通过升降伸入注液容器架料盘上的容器内进行注液,通过瓶盖吸头对容器进行合盖,所述机器人单元包括机器人和夹爪,所述夹爪用于抓取称重单元、料仓单元和注液单元的料盘,所述称重单元的输入架料盘上布置有样品容器,所述称量模块将样品定量称重至容器中,并将容器送至输出架的料盘;所述机器人单元将输出架的料盘搬运至料仓单元,或者机器人单元将输出架的料盘送至注液单元,注液单元对容器进行注液后,机器人单元将料盘送至振荡单元进行振荡,振荡完成后,再送回至料仓单元。
2.根据权利要求1所述的固体称量分选系统,其特征在于:所述称重单元还包括设置于称量模块一侧的贴标模块,所述容器在称重前进行贴标。
3.根据权利要求1所述的固体称量分选系统,其特征在于:所述称量模块包括天平、翻转直振器和夹爪机械臂,所述天平上设置有兼容支撑座,所述夹爪机械臂将样品容器送至翻转直振器上,将空容器送至兼容撑座上,所述翻转直振器将样品容器翻后直振,通过天平的称重反馈实现精确称量,所述兼容支撑座从下至上形成三层放置容器的阶梯,分别用于放置坩埚、进样瓶和试管。
4.根据权利要求1至3中任一项所述的固体称量分选系统,其特征在于:所述机器人单元包括水平轨道,机器人安装在水平轨道上,所述水平轨道安装于工作台面上的支架上,所述水平轨道呈现左右方向布置,一端靠近所述称重单元,另一端位于注液单元的一侧。
5.根据权利要求4所述的固体称量分选系统,其特征在于:所述机器人的夹爪包括电缸上设置的两个抓手,两个抓手在各自的轨道上位移形成夹持和松开,两个抓手上设置摩擦垫,位置对应于料盘的夹持边。
6.根据权利要求4所述的固体称量分选系统,其特征在于:所述称重单元的输出架的一侧,设置废料架,所述输入架和输出架上均设置有多个料盘,所述输出架位于机器人单元一侧,开设输出口。
7.根据权利要求1至3中任一项所述的固体称量分选系统,其特征在于:所述料仓单元上设置三层料盘架,三层料盘架分别布置试管料盘、进样瓶料盘和坩埚料盘,所述振荡单元包括两个振荡器,并排设置在机器人单元一侧,所述振荡器内设置料盘架,所述振荡器内保持恒温。
8.一种固体称量分选方法,应用如权利要求1至7中任一项所述的固体称量分选系统,其特征在于:分选过程中使用的容器为试管或坩埚,分选方法包括如下步骤:
9.一种固体称量分选方法,应用如权利要求1至7中任一项所述的固体称量分选系统,其特征在于:分选过程中使用的容器为进样瓶,分选方法包括如下步骤:
10.根据权利要求9所述的固体称量分选方法,其特征在于:所述步骤(6)中,当振荡单元处于振荡工作过程中时,所述机器人将注液容器架上的料盘先送至料仓单元,当振荡单元空闲时,再将未振荡操作的料盘送至振荡单元进行振荡操作。
技术总结
本发明涉及实验室检测自动化技术领域,公开了一种固体称量分选系统,包括工作台面上设置的称重单元、料仓单元、注液单元、振荡单元和机器人单元,所述料仓单元用于布置料盘,所述料盘用于放置容器,所述称重单元将固体样品定量称重于容器中,所述注液单元包括注液容器架、注液臂和瓶盖架,所述机器人单元包括机器人和夹爪,所述夹爪用于抓取称重单元、料仓单元和注液单元的料盘,所述振荡单元对料盘进行振荡。本发明还公开了相应的固体称量分选方法。本发明使用全自动机器人实现样品自动化称量、加液加盖、恒温振荡的所有环节衔接,可实现无人化的操作,减少重复的人工搬运。
技术研发人员:马龙,张玉强,李泽熙,何东林,谭延斌,王春,蔡梦,张珂
受保护的技术使用者:中国冶金地质总局山东局集团测试有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!