一种车载激光雷达的外参标定方法、装置、设备及介质与流程
本申请涉及传感器,尤其涉及一种车载激光雷达的外参标定方法、装置、设备及介质。
背景技术:
1、在自动驾驶系统中,激光雷达在感知、定位方面发挥着重要作用。与相机类似,激光雷达也需要进行内外参数的标定。自动驾驶系统需要进行外参的标定,即激光雷达自身坐标系与车体坐标系的关系。
2、激光雷达与车体为刚性连接,两者间的相对姿态和位置固定不变。为了建立激光雷达之间以及激光雷达与车辆之间的相对坐标关系,需要对激光雷达的安装进行标定,并使激光雷达数据从激光雷达坐标系转换至车体坐标系上。
3、在相关技术中,通常可以使用标定间和摆正器对激光雷达进行标定,这种标定方法需要依赖专业的特殊场地和设备,成本高昂。
技术实现思路
1、有鉴于此,本说明书提供以下方法、装置、设备及介质。
2、在本申请的第一方面,提供一种车载激光雷达的外参标定方法,所述车载激光雷达部署在待测车辆上,所述方法包括:
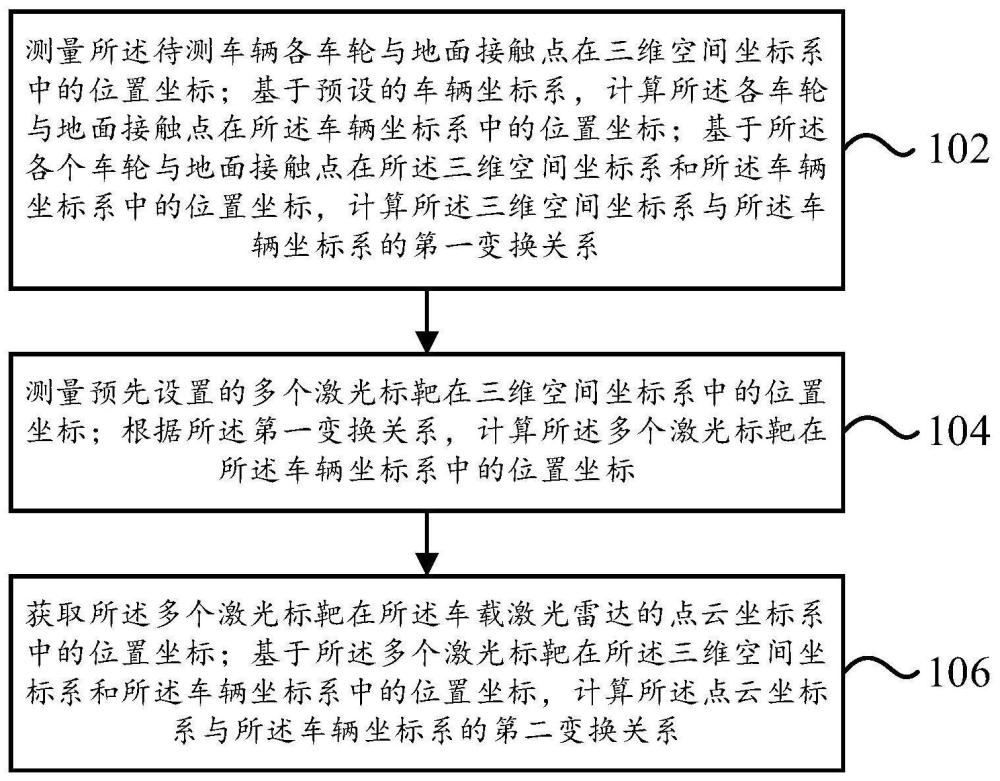
3、测量所述待测车辆各个车轮与地面接触点在三维空间坐标系中的位置坐标;基于预设的车辆坐标系,计算所述各个车轮与地面接触点在所述车辆坐标系中的位置坐标;基于所述各个车轮与地面接触点在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述三维空间坐标系与所述车辆坐标系的第一变换关系;
4、测量预先设置的多个激光标靶在三维空间坐标系中的位置坐标;根据所述第一变换关系,计算所述多个激光标靶在所述车辆坐标系中的位置坐标;
5、获取所述多个激光标靶在所述车载激光雷达的点云坐标系中的位置坐标;基于所述多个激光标靶在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述点云坐标系与所述车辆坐标系的第二变换关系。
6、在本申请的第二方面,提供了一种车载激光雷达的外参标定装置,所述车载激光雷达部署在待测车辆上,所述装置包括:
7、第一变换计算单元,用于测量所述待测车辆各个车轮与地面接触点在三维空间坐标系中的位置坐标;基于预设的车辆坐标系,计算所述各个车轮与地面接触点在所述车辆坐标系中的位置坐标;基于所述各个车轮与地面接触点在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述三维空间坐标系与所述车辆坐标系的第一变换关系;
8、位置坐标变换单元,用于测量预先设置的多个激光标靶在三维空间坐标系中的位置坐标;根据所述第一变换关系,计算所述多个激光标靶在所述车辆坐标系中的位置坐标;
9、第二变换计算单元,用于获取所述多个激光标靶在所述车载激光雷达的点云坐标系中的位置坐标;基于所述多个激光标靶在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述点云坐标系与所述车辆坐标系的第二变换关系。
10、在本申请的第三方面,提供了一种电子设备,包括通信接口、处理器、存储器和总线,所述通信接口、所述处理器和所述存储器之间通过总线相互连接;
11、所述存储器中存储机器可读指令,所述处理器通过调用所述机器可读指令,执行以下方法:
12、测量所述待测车辆各个车轮与地面接触点在三维空间坐标系中的位置坐标;基于预设的车辆坐标系,计算所述各个车轮与地面接触点在所述车辆坐标系中的位置坐标;基于所述各个车轮与地面接触点在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述三维空间坐标系与所述车辆坐标系的第一变换关系;
13、测量预先设置的多个激光标靶在三维空间坐标系中的位置坐标;根据所述第一变换关系,计算所述多个激光标靶在所述车辆坐标系中的位置坐标;
14、获取所述多个激光标靶在所述车载激光雷达的点云坐标系中的位置坐标;基于所述多个激光标靶在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述点云坐标系与所述车辆坐标系的第二变换关系。
15、在本申请的第四方面,提供了一种机器可读存储介质,所述机器可读存储介质存储有机器可读指令,所述机器可读指令在被处理器调用和执行时,实现以下方法:
16、测量所述待测车辆各个车轮与地面接触点在三维空间坐标系中的位置坐标;基于预设的车辆坐标系,计算所述各个车轮与地面接触点在所述车辆坐标系中的位置坐标;基于所述各个车轮与地面接触点在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述三维空间坐标系与所述车辆坐标系的第一变换关系;
17、测量预先设置的多个激光标靶在三维空间坐标系中的位置坐标;根据所述第一变换关系,计算所述多个激光标靶在所述车辆坐标系中的位置坐标;
18、获取所述多个激光标靶在所述车载激光雷达的点云坐标系中的位置坐标;基于所述多个激光标靶在所述三维空间坐标系和所述车辆坐标系中的位置坐标,计算所述点云坐标系与所述车辆坐标系的第二变换关系。
19、本申请通过直接对车辆车轮接地点进行测绘,可以计算测绘坐标系与车辆坐标系的坐标变换关系,再通过对测绘激光雷达标靶进行测绘,间接获取激光雷达靶标相对于车体坐标系的三维位置关系,从而计算出激光雷达的点云坐标系与车辆坐标系的变换关系,即该车载激光雷达的外参。该方法不依赖车辆摆正装置和高精度安装的标定房,可大幅减少标定成本,车辆也不需要运动,不受恶劣天气的影响,具有通用性。
技术特征:
1.一种车载激光雷达的外参标定方法,其特征在于,所述车载激光雷达部署在待测车辆上,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,
4.根据权利要求1所述的方法,其特征在于,
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,
7.根据权利要求1所述的方法,其特征在于,
8.一种车载激光雷达的外参标定装置,其特征在于,所述车载激光雷达部署在待测车辆上,所述装置包括:
9.一种存储介质,其特征在于,其上存储有计算机程序,该计算机程序执行时实现如权利要求1-7中任一项所述方法的步骤。
10.一种计算机设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现如权利要求1-7中任一项所述的方法。
技术总结
本申请提供一种车载激光雷达的外参标定方法、装置、设备及介质。所述车载激光雷达部署在待测车辆上,所述方法包括:测量待测车辆各个车轮与地面接触点在三维空间坐标系中的坐标;基于预设的车辆坐标系,计算各个车轮与地面接触点在车辆坐标系中的坐标;基于各个车轮与地面接触点在三维空间坐标系和车辆坐标系中的坐标,计算三维空间坐标系与车辆坐标系的第一变换关系;测量预先设置的多个激光标靶在三维空间坐标系中的坐标;根据第一变换关系,计算多个激光标靶在车辆坐标系中的坐标;获取多个激光标靶在车载激光雷达的点云坐标系中的坐标;基于多个激光标靶在三维空间坐标系和车辆坐标系中的坐标,计算点云坐标系与车辆坐标系的第二变换关系。
技术研发人员:徐乃江
受保护的技术使用者:浙江极氪智能科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!