一种基于光学和测距修正的小天体自主导航方法与流程
本发明涉及一种基于光学和测距修正的小天体自主导航方法,属于深空小天体探测自主导航领域。
背景技术:
1、在小天体远距离探测段可用于导航的测量敏感器主要包括测距敏感器、光学相机和惯性测量敏感器等,相应地基于光学和测距信息的自主导航方法是小天体远距离探测段的主要导航方式。基于光学和测距信息的自主导航方法以光学相机提供的小天体中心视线方向和测距敏感器提供的测距信息作为观测量进行自主导航解算。
2、然而,一方面测距敏感器测量的是探测器到小天体表面的距离,其容易受到地形起伏的影响,噪声比较大。在以往的月球、火星和小天体探测任务中,基于测距的导航算法均未考虑地形起伏的影响。对于月球和火星探测任务,测距敏感器通常只在着陆段使用,而选择的着陆区域又比较平坦,因此不考虑地形影响尚可接受,但对于不规则小天体探测任务,尤其是小天体自转速度较快时地形会严重影响导航精度;另一方面,现有的基于光学和测距信息的自主导航方法需要光学相机提供小天体的中心视线方向,这就要求小天体完全在光学相机视场内,当距离小天体较近光学相机只能看见小天体表面局部特征时,光学相机无法提供小天体中心视线方向测量,导致现有的基于光学和测距信息的自主导航方法不再使用。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,解决了小天体探测过程中利用光学相机和测距敏感器测量信息进行自主导航时测距容易受小天体地形影响以及近距离小天体充满光学相机视场后该导航方法不再适用的问题。
2、本发明目的通过以下技术方案予以实现:
3、一种基于光学和测距修正的小天体自主导航方法,包括:
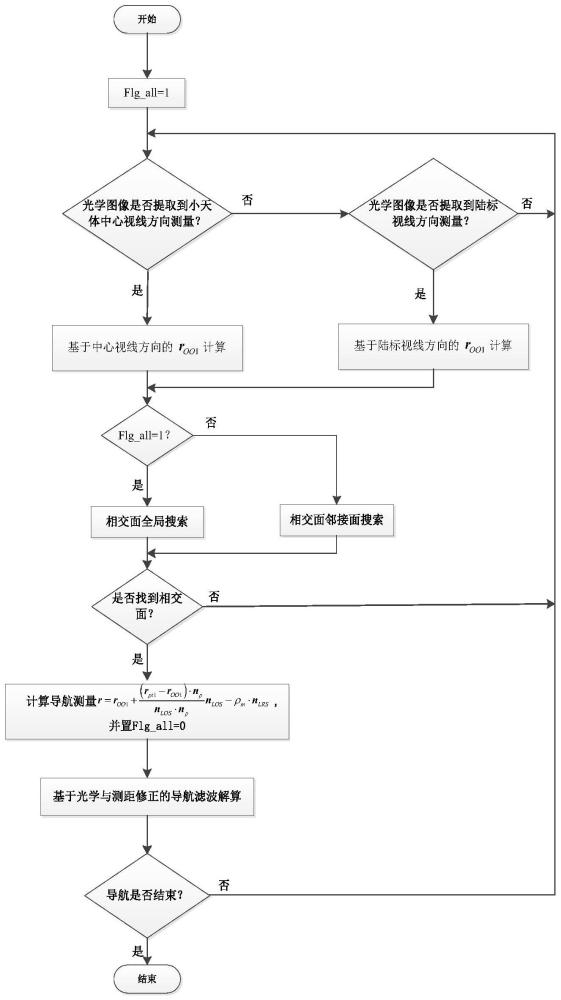
4、光学相机可见整个小天体时,利用小天体中心视线方向测量,光学相机只能看见小天体表面局部特征时,利用小天体表面陆标特征的视线方向测量,确定测距波束与小天体表面相交点的等价求解方式;
5、利用相交面全局搜索和邻接面搜索策略,确定小天体多面体模型中面的搜索顺序;
6、利用上述相交点的等价求解方式,按上述面的搜索顺序依次判断小天体多面体模型与测距波束是否相交,若相交则获取测距波束与小天体地形交点;
7、根据上述地形交点,确定探测器位置,作为基于光学和测距修正的自主导航系统观测量,采用定常导航滤波方法即可对自主导航系统状态进行实时估计,实现自主导航。
8、一种计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令在由处理器加载并运行时,使所述处理器执行所述基于光学和测距修正的小天体自主导航方法。
9、本发明相比于现有技术具有如下有益效果:
10、本发明提出了基于小天体中心视线方向和测距修正的远距离自主导航方法,以及基于小天体表面陆标视线方向和测距修正的近距离自主导航方法,实现了小天体探测远距离和近距离接力导航,扩展了基于光学和测距修正导航方法的适用范围;本发明提出了融合光学视线测量以及测距敏感器测量信息的测距修正方法,利用视线和测距测量可直接判断测距波束是否与多面体某个面是否相交,而无需通过搜索的方法进行判断,极大简化了计算过程;本发明提出了相交面的全局搜索和邻接面搜索策略以及搜索策略的相互更迭,有效提高了测距修正算法的可靠性和效率。
技术特征:
1.一种基于光学和测距修正的小天体自主导航方法,其特征在于,包括:
2.根据权利要求1所述的基于光学和测距修正的小天体自主导航方法,其特征在于,假设o为小天体中心,roo1为从o点到o1点的矢量,根据小天体中心视线方向和测距值及测距方向按下式计算得到:
3.根据权利要求1所述的基于光学和测距修正的小天体自主导航方法,其特征在于,当图像中无法有效提取小天体中心视线方向时,通过提取图像中已知特征点p1的视线方向对测距进行修正;假设o为小天体中心,roo1为从o点到o1点的矢量,nlos1和nlos2分别为过o1点和o点且与nlos平行的直线;roo1根据陆标p1的视线方向、陆标位置和测距值及测距方向按下式计算得到:
4.根据权利要求2或3所述的基于光学和测距修正的小天体自主导航方法,其特征在于,在确定小天体多面体模型中面的搜索顺序前,对测距波束与小天体多面体模型进行相交面判断。
5.根据权利要求4所述的基于光学和测距修正的小天体自主导航方法,其特征在于,设测距波束与小天体模型交点为rlf,可由下式表示为:
6.根据权利要求5所述的基于光学和测距修正的小天体自主导航方法,其特征在于,设小天体多面体模型其中一个三角形平面的三个点分别为:
7.根据权利要求6所述的基于光学和测距修正的小天体自主导航方法,其特征在于,确定小天体多面体模型中面的搜索顺序包括:
8.一种计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令在由处理器加载并运行时,使所述处理器执行如权利要求1至7中任一项所述的方法。
技术总结
一种基于光学和测距修正的小天体自主导航方法,包括:光学相机可见整个小天体时,利用小天体中心视线方向测量,光学相机只能看见小天体表面局部特征时,利用小天体表面陆标特征的视线方向测量,确定测距波束与小天体表面相交点的等价求解方式;利用相交面全局搜索和邻接面搜索策略,确定小天体多面体模型中面的搜索顺序;利用上述相交点的等价求解方式,按上述面的搜索顺序依次判断小天体多面体模型与测距波束是否相交,若相交则获取测距波束与小天体地形交点;根据上述地形交点,确定探测器位置,作为基于光学和测距修正的自主导航系统观测量,采用定常导航滤波方法即可对自主导航系统状态进行实时估计,实现自主导航。
技术研发人员:徐超,胡锦昌,刘一武,胡少春,李茂登,李志平,顾朋,唐青原,张莹莹,陈尧
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!