视觉雷达装置
本发明涉及定位与导航领域,尤其涉及一种视觉雷达装置。
背景技术:
1、随着技术的高速发展,视觉惯性系统也在各个领域的使用越来越多,因此也对于视觉惯性系统提出了更高的要求。
2、传统的视觉惯性系统是通过摄像头和机载的imu(inertial measurement unit,惯性测量单元)固定在一起并组成,并直接装载于各类设备。这种视觉惯性系统存在很大的缺陷,会存在定位与建图的能力会受到相机视场角限制,且缺乏主动感知的能力,即感知与主动运动解耦的能力的现象,即,这种视觉惯性系统会由于定位与建图的能力会受到相机视场角限制,进而造成视野范围和主动感知能力较低。
技术实现思路
1、本发明的主要目的在于提出一种视觉雷达装置,旨在如何提高视觉惯性系统的视野范围和主动感知能力。
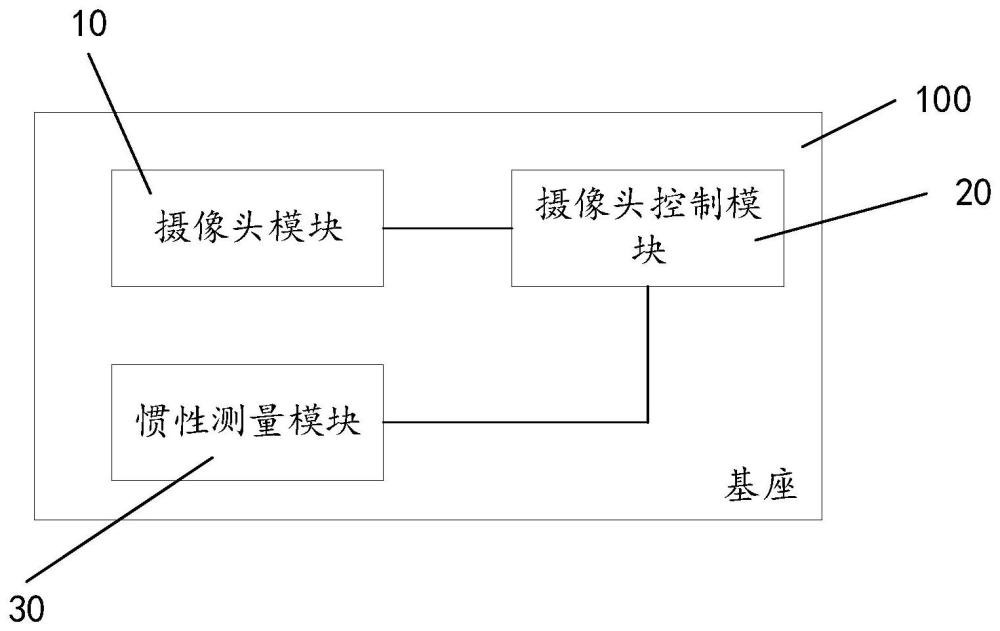
2、为实现上述目的,本发明提供一种视觉雷达装置,所述视觉雷达装置包括摄像头模块、摄像头控制模块、惯性测量模块和基座;
3、所述摄像头模块、所述摄像头控制模块和所述惯性测量模块分别设置在所述基座上,所述摄像头控制模块分别与所述摄像头模块和所述惯性测量模块连接。
4、可选地,所述摄像头模块包括摄像头和滑环,所述摄像头与所述滑环通信连接,所述滑环的定子与所述摄像头控制模块机械连接。
5、可选地,所述摄像头控制模块包括磁场定向控制板和直流无刷电机,所述磁场定向控制板上至少包括第一微控芯片和编码器,所述滑环的定子与所述直流无刷电机的定子机械连接,所述直流无刷电机的定子设置在所述基座上,所述第一微控芯片分别与所述直流无刷电机的电机控制端、所述惯性测量模块和所述编码器连接,所述编码器与所述直流无刷电机的电机采集端连接。
6、可选地,所述惯性测量模块包括单片机控制板,所述单片机控制板至少包括第二微控芯片和惯性测量单元,所述第二微控芯片分别与所述惯性测量单元和所述第一微控芯片连接。
7、可选地,所述视觉雷达装置还包括arm控制器,所述arm控制器通过通讯总线分别与所述第一微控芯片和所述第二微控芯片连接,所述arm控制器通过所述滑环与所述摄像头通信连接。
8、可选地,所述通讯总线包括rs485总线。
9、可选地,所述视觉雷达装置还包括电源,所述电源分别与所述摄像头模块的电源端、所述摄像头控制模块的电源端、所述惯性测量模块的电源端和所述arm控制器的电源端连接。
10、可选地,在所述视觉雷达装置工作时,所述编码器用于采集所述直流无刷电机的位置信息,所述第一微控芯片用于基于所述位置信息和所述第二微控芯片的视觉雷达控制信息对所述直流无刷电机进行控制。
11、可选地,在所述视觉雷达装置工作时,所述第二微控芯片用于基于预设的控制轨迹,或,采集所述惯性测量单元的姿态信号生成视觉雷达控制信息。
12、可选地,在所述视觉雷达装置工作时,所述arm控制器用于采集所述摄像头的视觉信号、所述惯性测量单元的惯性测量信号和所述编码器的角度信号,并基于所述视觉信号、所述惯性测量信号和角度信号运行视觉惯性编码器里程计算法,其中,所述惯性测量信号包括加速度和角速度。
13、本发明提供了一种视觉雷达装置,该电路包括摄像头模块、摄像头控制模块、惯性测量模块和基座;所述摄像头模块、所述摄像头控制模块和所述惯性测量模块分别设置在所述基座上,所述摄像头控制模块分别与所述摄像头模块和所述惯性测量模块连接。通过将摄像头模块、摄像头控制模块和惯性测量模块分别设置在基座上,且摄像头控制模块分别与摄像头模块和惯性测量模块连接。从而避免了现有技术中需要将摄像头和机载的imu(惯性测量模块)固定的现象发生,这种视觉雷达装置可以使摄像头模块与惯性测量模块分离,同时将编码器信息纳入摄像头控制模块,进而可以提高视觉惯性系统的视野范围和主动感知能力。
技术特征:
1.一种视觉雷达装置,其特征在于,所述视觉雷达装置包括摄像头模块、摄像头控制模块、惯性测量模块和基座;
2.如权利要求1所述视觉雷达装置,其特征在于,所述摄像头模块包括摄像头和滑环,所述摄像头与所述滑环通信连接,所述滑环的定子与所述摄像头控制模块机械连接。
3.如权利要求2所述视觉雷达装置,其特征在于,所述摄像头控制模块包括磁场定向控制板和直流无刷电机,所述磁场定向控制板上至少包括第一微控芯片和编码器,所述滑环的定子与所述直流无刷电机的定子机械连接,所述直流无刷电机的定子设置在所述基座上,所述第一微控芯片分别与所述直流无刷电机的电机控制端、所述惯性测量模块和所述编码器连接,所述编码器与所述直流无刷电机的电机采集端连接。
4.如权利要求3所述视觉雷达装置,其特征在于,所述惯性测量模块包括单片机控制板,所述单片机控制板至少包括第二微控芯片和惯性测量单元,所述第二微控芯片分别与所述惯性测量单元和所述第一微控芯片连接。
5.如权利要求4所述视觉雷达装置,其特征在于,所述视觉雷达装置还包括arm控制器,所述arm控制器通过通讯总线分别与所述第一微控芯片和所述第二微控芯片连接,所述arm控制器通过所述滑环与所述摄像头通信连接。
6.如权利要求5所述视觉雷达装置,其特征在于,所述通讯总线包括rs485总线。
7.如权利要求6所述视觉雷达装置,其特征在于,所述视觉雷达装置还包括电源,所述电源分别与所述摄像头模块的电源端、所述摄像头控制模块的电源端、所述惯性测量模块的电源端和所述arm控制器的电源端连接。
8.如权利要求6所述视觉雷达装置,其特征在于,在所述视觉雷达装置工作时,所述编码器用于采集所述直流无刷电机的位置信息,所述第一微控芯片用于基于所述位置信息和所述第二微控芯片的视觉雷达控制信息对所述直流无刷电机进行控制。
9.如权利要求8所述视觉雷达装置,其特征在于,在所述视觉雷达装置工作时,所述第二微控芯片用于基于预设的控制轨迹,或,采集所述惯性测量单元的姿态信号生成视觉雷达控制信息。
10.如权利要求9所述视觉雷达装置,其特征在于,在所述视觉雷达装置工作时,所述arm控制器用于采集所述摄像头的视觉信号、所述惯性测量单元的惯性测量信号和所述编码器的角度信号,并基于所述视觉信号、所述惯性测量信号和角度信号运行视觉惯性编码器里程计算法,其中,所述惯性测量信号包括加速度和角速度。
技术总结
本发明涉及定位与导航领域,并公开了一种视觉雷达装置,视觉雷达装置包括摄像头模块、摄像头控制模块、惯性测量模块和基座;所述摄像头模块、所述摄像头控制模块和所述惯性测量模块分别设置在所述基座上,所述摄像头控制模块分别与所述摄像头模块和所述惯性测量模块连接。本发明提高了视觉惯性系统的视野范围和主动感知能力。
技术研发人员:喻俊志,莘展骅,熊严,孟岩,孔诗涵
受保护的技术使用者:北京大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!