一种用于双冗余惯性测量单元的故障诊断方法
本发明涉及惯性导航系统,具体涉及一种用于双冗余惯性测量单元的故障诊断方法。
背景技术:
1、惯性导航系统能够自主地在全天候、全球范围内和任何介质环境里进行连续的定位定向,基于这些独特的优点使得它被选定为组合导航系统的主要子系统,并且组合导航系统认为其内部的惯性子系统始终可靠不会发生故障,一旦惯性导航系统发生故障,那么组合导航系统输出的导航信息必定会受到污染,因此组合导航的性能高度依赖于系统内惯性导航系统的可靠性。为了实现惯性导航的可靠性,可以使用两套及以上的惯性测量单元(inertial measurement unit,imu)构成冗余惯性导航系统,以冗余备份的方式通过实时故障检测与诊断提高惯性信息的可靠性。然而在目前的研究下使用两套imu抽成的二重冗余下惯性器件的故障可以被检测出来但是难以被诊断,缺乏可以直接应用于工程实践中的故障诊断方法。
技术实现思路
1、有鉴于此,本发明提供了一种用于双冗余惯性测量单元的故障诊断方法,能够定位到具体特定传感器的故障,有效提升了冗余惯性系统在两重冗余下的故障诊断能力。
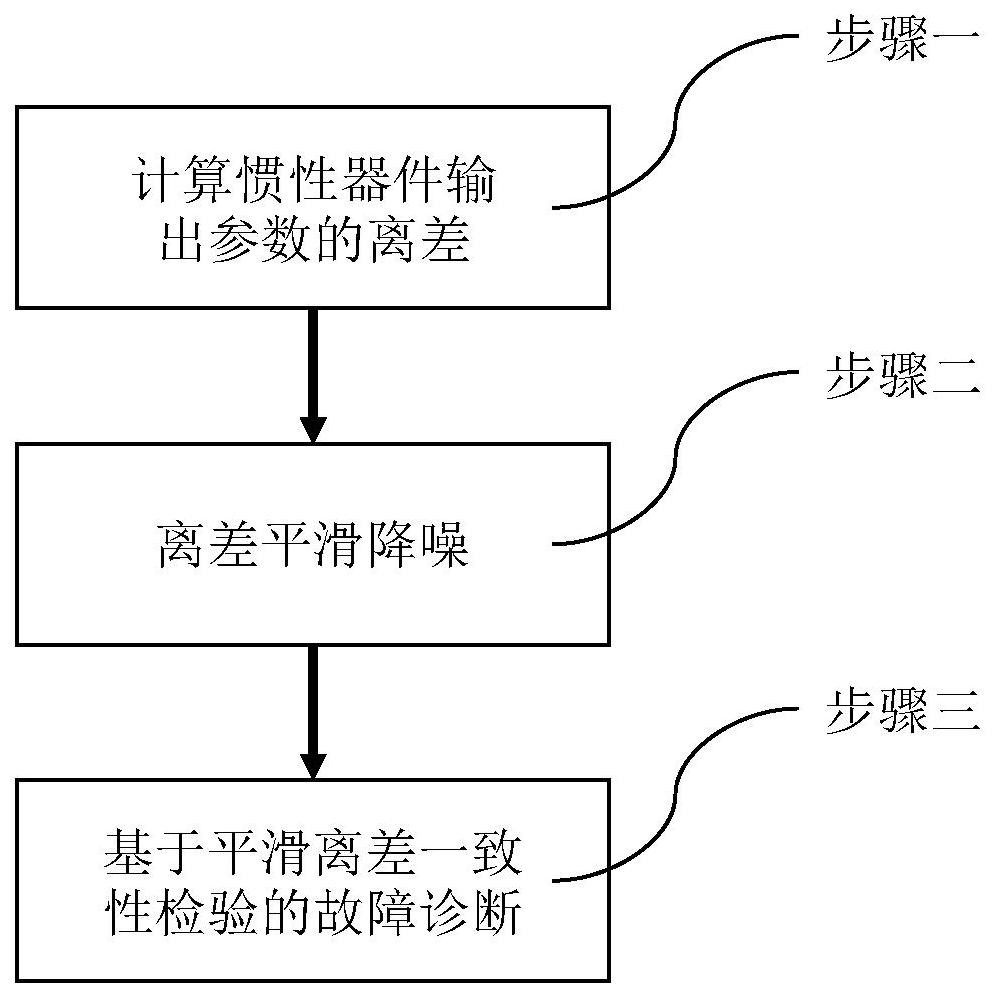
2、本发明的用于双冗余惯性测量单元的故障诊断方法,计算惯性测量单元各器件输出值的离差;离差不为0对应的器件诊断为出现故障。
3、较优的,当存在器件噪声时,对两个惯性测量单元同一个轴向器件的离差进行比较,更大的离差对应的器件诊断为出现故障。
4、较优的,对离差数据进行降噪平滑后,再进行故障诊断。
5、较优的,采用指数滑动平均法对离差数据进行降噪平滑:
6、
7、其中,和分别为k时刻和k-1时刻惯性测量单元器件输出值的平滑离差,d(k)为k时刻惯性测量单元器件输出值的离差,w∈(0,1]表示衰减权重。
8、较优的,故障轴的诊断方法为:
9、
10、其中,i∈{1,2,3}表示发生故障的坐标轴;|| ||2表示欧几里得范数;为k时刻惯性测量单元器件奇偶向量的第a个分量;
11、故障惯性测量单元的诊断方法为:
12、
13、其中,j∈{1,2}表示发生故障的惯性测量单元,表示的第i个分量。
14、较优的,惯性测量单元的器件包括陀螺仪和加速度计。
15、有益效果:
16、本发明基于惯性测量单元器件输出值的离差一致性,实现故障的精确定位,诊断性能不依赖于检测算法,计算量小、存储数据少,便于实时应用。
技术特征:
1.一种用于双冗余惯性测量单元的故障诊断方法,其特征在于,计算惯性测量单元各器件输出值的离差;离差不为0对应的器件诊断为出现故障。
2.如权利要求1所述的方法,其特征在于,当存在器件噪声时,对两个惯性测量单元同一个轴向器件的离差进行比较,更大的离差对应的器件诊断为出现故障。
3.如权利要求1或2所述的方法,其特征在于,对离差数据进行降噪平滑后,再进行故障诊断。
4.如权利要求3所述的方法,其特征在于,采用指数滑动平均法对离差数据进行降噪平滑:
5.如权利要求3所述的方法,其特征在于,故障轴的诊断方法为:
6.如权利要求1所述的方法,其特征在于,惯性测量单元的器件包括陀螺仪和加速度计。
技术总结
本发明公开了一种用于双冗余惯性测量单元的故障诊断方法。使用本发明能够定位到具体特定传感器的故障,有效提升了冗余惯性系统在两重冗余下的故障诊断能力。本发明基于惯性测量单元器件输出值的离差一致性,通过计算惯性测量单元各器件输出值的离差,离差不为0或者是更大的离差对应的器件诊断为出现故障,实现故障的精确定位,诊断性能不依赖于检测算法,计算量小、存储数据少,便于实时应用。
技术研发人员:肖烜,卢建睿,李寒凌,邓志红
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!