一种雷达安装高度计算方法、雷达系统及存储介质与流程
本发明涉及毫米波雷达,尤其涉及一种雷达安装高度计算方法、雷达系统及存储介质。
背景技术:
1、在智能家居领域,毫米波雷达是用于室内人员检测的重要传感器,常常用来对室内人员进行跟踪定位和跌倒检测。这种毫米波雷达往往安装在房间墙壁或者天花板上。而雷达传感器距离地面的安装高度是影响其性能的重要因素,它往往作为初始配值参数在安装雷达的时候由用户反馈给雷达传感器。如果该参数不准确,可能导致雷达性能严重下降,例如雷达跌倒检测误报率或者漏报率增加。
2、当前工程应用中,通常要求用户手动测量雷达的安装高度值,然后反馈给雷达。然而,这种方式存在一些弊端。其一,当雷达安装位置较高时,需要用户借助攀爬工具才能准确测量安装高度,增加了测量难度。其二,当雷达下方地面堆放有杂物时,用户较难准确测量雷达的安装高度值。因此有必要设计一种自动计算雷达安装高度的方法,以提升家居雷达产品的使用便利性。
技术实现思路
1、本发明提供了一种雷达安装高度计算方法、雷达系统及存储介质,以解决因手动测量雷达安装高度带来雷达使用便利性下降的问题。
2、本发明采用的技术方案是:第一方面,本发明提供一种雷达安装高度计算方法,包括:
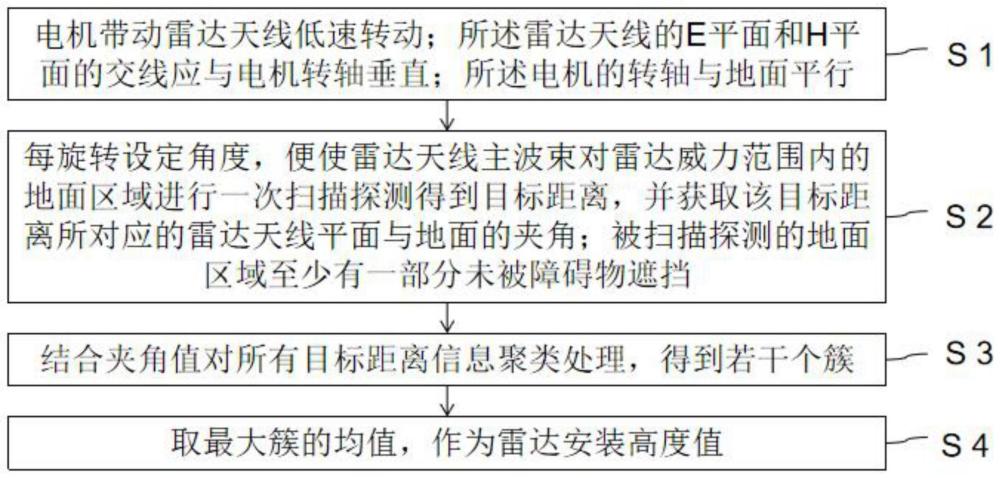
3、电机带动雷达天线低速转动;所述雷达天线的e平面和h平面的交线应与电机转轴垂直;所述电机的转轴与地面平行;
4、每旋转设定角度,便使雷达天线主波束对雷达威力范围内的地面区域进行一次扫描探测得到目标距离,并获取该目标距离所对应的雷达天线平面与地面的夹角;被扫描探测的地面区域至少有一部分未被障碍物遮挡;
5、结合夹角值对所有目标距离信息聚类处理,得到若干个簇;
6、取最大簇的均值,作为雷达安装高度值。
7、进一步的,所述雷达天线平面与地面的夹角通过安装在雷达天线平面上的倾角传感器求得。
8、进一步的,所述扫描探测的夹角范围为0°至45°,0°为雷达视轴方向与地面垂线重合。
9、第二方面,本发明还提供一种雷达系统,包括:
10、底座,用于安装在墙壁或天花板上;
11、电机,安装在所述底座上,所述电机的转轴与地面平行;
12、雷达天线,安装在所述电机的转轴上,所述雷达天线的e平面和h平面的交线应与电机转轴垂直;
13、配置单元,用于存储用户输入的配置参数,并将不同参数传递给控制器和夹角计算单元;
14、信号处理单元,用于对雷达威力范围内的地面区域进行扫描探测得到目标距离;
15、倾角传感器,安装在雷达天线平面上,用于实时获取天线平面的倾斜角;
16、夹角计算单元,根据用户输入配置参数和倾角传感器输入值,实时计算天线平面与地面的夹角,并输出夹角值到控制单元;
17、控制单元,用于控制电机的转动、雷达探测的启停,并接收配值参数和夹角信息;
18、高度计算单元,用于根据目标距离和倾斜角计算雷达安装高度值。
19、进一步的,还包括:人机交互界面,用于向用户显示输出雷达安装高度值和用户输入配置参数。
20、进一步的,所述电机为步进电机。
21、第三方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的雷达安装高度计算方法。
22、本发明的有益效果是:
23、(1)本发明提出基于低成本电机和倾角传感器的雷达系统实现自动计算雷达安装高度值,提升了智能家居雷达使用便利性。
24、(2)以往将毫米波雷达安装在室内墙壁或天花板上之后,还需要对安装高度进行精确测量,测量的过程容易造成误差,且操作麻烦,特别是雷达正下方有障碍物时,容易造成较大的测量误差。通过本发明提供的雷达安装高度计算方法,只需要将毫米波雷达安装在室内墙壁或天花板上,雷达会自动测量高度,且由于雷达可旋转探测,因此即使雷达正下方有障碍物也不会造成测量误差。
技术特征:
1.一种雷达安装高度计算方法,其特征在于,包括:
2.根据权利要求1所述的雷达安装高度计算方法,其特征在于,所述雷达天线平面与地面的夹角通过安装在雷达天线平面上的倾角传感器求得。
3.根据权利要求1所述的雷达安装高度计算方法,其特征在于,所述扫描探测的夹角范围为0°至45°,0°为雷达视轴方向与地面垂线重合。
4.一种雷达系统,其特征在于,包括:
5.根据权利要求4所述的雷达系统,其特征在于,还包括:
6.根据权利要求4所述的雷达系统,其特征在于,所述电机为步进电机。
7.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-3中任一所述的雷达安装高度计算方法。
技术总结
本发明公开了一种雷达安装高度计算方法、雷达系统及存储介质,计算方法包括电机带动雷达天线低速转动;雷达天线的E平面和H平面的交线应与电机转轴垂直;电机的转轴与地面平行;每旋转设定角度,便使雷达天线主波束对雷达威力范围内的地面区域进行一次扫描探测得到目标距离,并获取该目标距离所对应的雷达天线平面与地面的夹角;被扫描探测的地面区域至少有一部分未被障碍物遮挡;结合夹角值对所有目标距离信息聚类处理,得到若干个簇;取最大簇的均值,作为雷达安装高度值。通过本发明提供的计算方法,只需要将毫米波雷达安装在室内墙壁或天花板上,雷达会自动测量高度,且由于雷达可旋转探测,因此即使雷达正下方有障碍物也不会造成测量误差。
技术研发人员:周杨,李晓冬,杨锋,梁庆真
受保护的技术使用者:四川启睿克科技有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!