多域多航行器的运动信息校准和融合的方法与流程
属于数据处理领域,尤其涉及一种多域多航行器的运动信息校准和融合的方法。
背景技术:
1、多域航行器主要指在空中、水面、水下、陆上等空间运动的航行器,多域航行器的运动信息主要指位置、速度、航向等,运动信息校准融合技术是多域航行器协同任务决策、执行能力评估等的重要信息表征支撑;
2、通常情况下为获得多域航行器运动信息,依托各航行器自身传感器或在航行器上安装外测运动信息采集设备,以采集多域航行器位置、速度、航向等。由于数据来源多样、数据采集及传输技术形式多样、传感器及采集设备精度误差不同、工作频率不一,使得多模态的运动信息采集后难以融合,多域航行器运动信息采集后的误差校准、时间对齐、匹配融合等成为了本领域亟待解决的技术问题。
技术实现要素:
技术实现思路
1、本申请的发明目的提出一种多域航行器运动信息融合方法。
2、为了完成本申请的发明目的,本申请采用以下技术方案:
3、本发明的一种多域多航行器的运动信息校准和融合的方法,其中:它包括以下步骤:
4、(一)、基准点的标识
5、水面和陆上的航行器在可达区域设置基准点,空中的航行器在其陆上或水面投影处设置基准点,水下的航行器在水面投影处设置基准点,在上述基准点上布置醒目标识;
6、(二)、基准点位置的测量标校
7、通过差分gps或北斗高精度测量设备完成对基准点绝对位置的测量,获得上述基准点的标校位置m{x,y,z},即作为真值,在忽略高程数据的情况下,则上述基准点的标校位置的经纬度为m{x,y};
8、(三)、航行器位置误差标校
9、航行器位置误差指内测位置误差和外测位置误差,航行器航行至上述对应基准点,由其自带的运动信息采集传感器记录上述对应基准点的位置信息,航行器采集到的位置信息为m{x,y,z},则航行器采集到的经纬度位置信息为m{x,y};
10、根据经纬度坐标与utm(universal transverse mercator)平面坐标转换公式可得m{x,y}、m{x,y}分别在平面坐标系下的位置me{xe,ye},me{xe,ye},则可得到位置信息误差δl在平面坐标系下的分量为δlx和δly,
11、
12、计算航行器采集信息与对应标校位置信息误差δl,
13、
14、(四)、航行器航向误差标校
15、航行器航向误差指航向内测误差和外测误差;设置到达点1和到达点2,到达点1和到达点2外测真值位置连线与正东方向的夹角为航向真值在测试过程中,航行器以其巡航速度由到达点1航行至到达点2,由航行器自带的运动信息采集传感器记录内测航向
16、则航行器的航向误差为:
17、
18、(五)、航行器的航速误差标校
19、航行器的航速误差指巡航速度内测误差和外测误差,考虑环境中风向和流向对航速的影响,测试并计算航行器正向及反向航行过程中的平均速度,以获得航行器精确的平均巡航速度v作为速度真值,
20、通过高精度测试设备得到到达点1至到达点2两点之间的距离v,航行器以巡航速度由到达点1航行至到达点2为正向航行,记录正向耗时tg;再由到达点2航行至到达点1为反向航行,记录反向耗时tr;则航行器平均巡航速度真值v为:
21、
22、v在水平、垂直的分量分别为vx、vy:
23、
24、
25、在测试过程中,依据航行器内置的速度传感器记录内测平均速度v,则航行器速度误差为:
26、
27、在水平、垂直的分量分别为
28、
29、
30、(六)、航行器时间误差标校
31、航行器航行至任意到达点,记录当前北京时间t为真值时间,记录航行器系统时间t为内测时间,则航行器时间误差为:
32、δt=t-t-----公式(10)
33、(七)、匹配融合
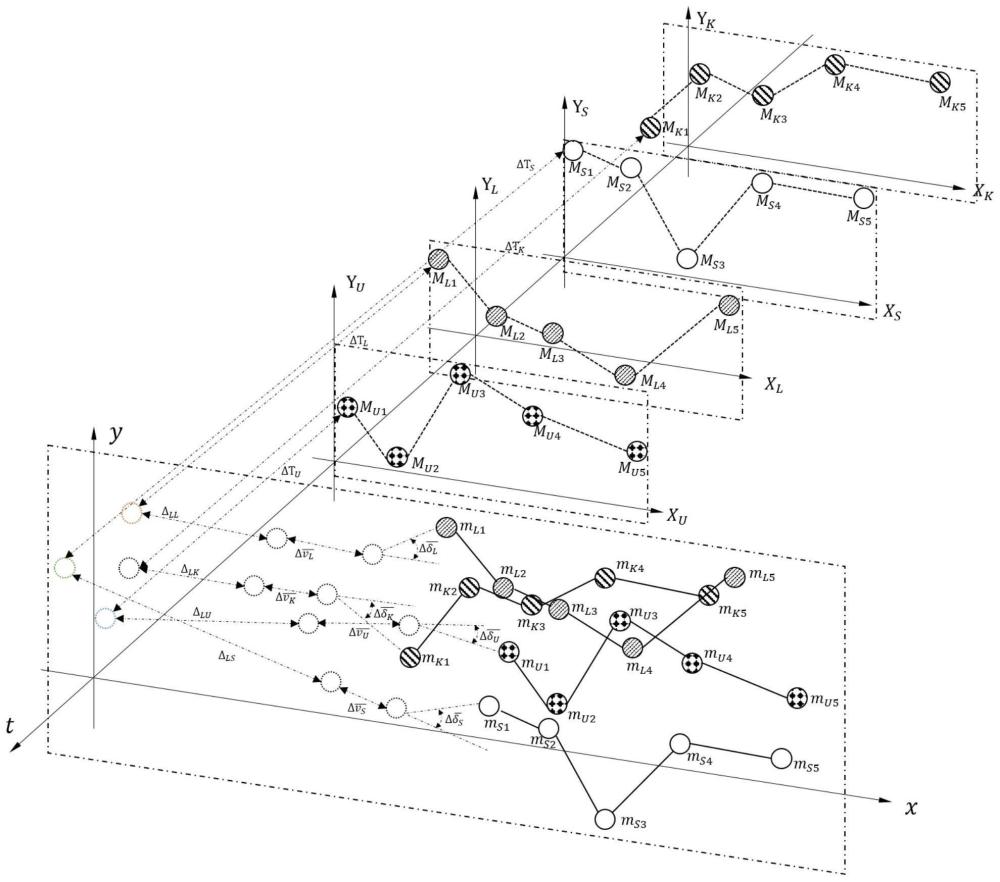
34、对于测试过程中,航行器内测位置数据集mi{xi,yi,ti},按照“时间对齐→位置误差校准→航速误差校准→航向误差校准”的顺序进行数据匹配融合;
35、(a)、时间对齐后的位置
36、mti{xi,yi,ti}为时间对齐后位置,ti为对齐前航行器的系统内测时间,ti为对齐后的背景时间,
37、
38、即
39、
40、(b)、初始位置误差校准后的位置
41、初始位置误差为固定常数误差,初始位置误差校准后的位置为mtli(xli,yli,ti),xli和yli分别为xi和yi经过初始位置误差校准后的值,
42、
43、即
44、
45、(c)、航速误差校准后的位置
46、航速误差为航速和航向误差造成的位移累计误差,航速误差校准后的位置为mtlvi(xlvi,ylvi,ti),xlvi和ylvi分别为xi和yi经过初始位置误差校准和航速误差校准后的值,
47、
48、即
49、
50、(d)、航向误差校准后的位置
51、航向误差校准后的位置为mtlvδi(xlvδi,ylvδi,ti),xlvδi和ylvδi分别为xi和yi经过初始位置误差校准、航速误差校准以及航向误差校准后的值,
52、
53、本发明的一种多域多航行器的运动信息校准和融合的方法,其中:所述的醒目标识为旗帜或浮标。
54、本发明的一种多域多航行器的运动信息校准和融合的方法,其中:所述运动信息采集传感器为卫星导航、惯导或磁力仪。
55、本发明的一种多域多航行器的运动信息校准和融合的方法,其中:所述到达点1和到达点2之间的距离在航行器的续航力范围内。
56、本发明的一种多域多航行器的运动信息校准和融合的方法,其中:所述速度传感器为惯导、速度计或加速度计。
57、本发明的一种多域多航行器的运动信息校准和融合的方法,其中:在航速误差标校和航向位置标校时,到达点及到达顺序应相同,均为从到达点1到到达点2。
58、本发明为了解决多域航行器运动信息多模态难融合的问题,提供一种多域航行器运动信息融合方法,通过误差标校、时间对齐、匹配融合,实现对多域航行器位置、速度、航向等运动信息融合,为多域协同任务决策、效果评估等提供支撑。
技术特征:
1.一种多域多航行器的运动信息校准和融合的方法,其特征在于:它包括以下步骤:
2.如权利要求1所述的多域多航行器的运动信息校准和融合的方法,其特征在于:所述的醒目标识为旗帜或浮标。
3.如权利要求2所述的多域多航行器的运动信息校准和融合的方法,其特征在于:所述运动信息采集传感器为卫星导航、惯导或磁力仪。
4.如权利要求3所述的多域多航行器的运动信息校准和融合的方法,其特征在于:所述到达点1和到达点2之间的距离在航行器的续航力范围内。
5.如权利要求4所述的多域多航行器的运动信息校准和融合的方法,其特征在于:所述速度传感器为惯导、速度计或加速度计。
6.如权利要求5所述的多域多航行器的运动信息校准和融合的方法,其特征在于:在航速误差标校和航向位置标校时,到达点及到达顺序应相同,均为从到达点1到到达点2。
技术总结
本发明多域多航行器的运动信息校准和融合的方法包括:信息校准和融合处理,信息校准包括:基准点的标识、基准点位置的测量标校、航行器位置误差标校、航行器航向误差标校、航行器的航速误差标校和航行器时间误差标校,融合处理按照“时间对齐→位置误差校准→航速误差校准→航向误差校准”的顺序进行数据匹配融合;它包括:时间对齐后的位置、初始位置误差校准后的位置、航速误差校准后的位置和航向误差校准后的位置,本发明通过误差标校、时间对齐、匹配融合,实现对多域航行器位置、速度、航向等运动信息融合,为多域协同任务决策、效果评估等提供支撑。
技术研发人员:王艺欣雨,李铁术,江雨珊,付朝晖,王恒,莫剑飞
受保护的技术使用者:昆明船舶设备研究试验中心(中国船舶集团有限公司七五〇试验场)
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!