一种基于太阳位置变化率的自主定位方法
本发明属于偏振光导航领域,具体涉及一种基于太阳位置变化率的自主定位方法。
背景技术:
1、导航与定位系统是车辆、舰船、无人机等各类运动体的核心基础技术,是其能够顺利执行任务的先决条件。但现有各类定位方法仍存在一定的问题,例如,卫星导航系统信号功率低,容易受到空间气象、电子干扰等各类因素的影响,可靠性有待提高;惯性导航误差、尤其是定位误差随时间累积,定位结果逐渐发散;无线电导航信号无法覆盖全球所有区域;天文导航方法在大气层内受到空气折射、背景杂光等环境影响,应用受限,因此迫切需要一种无源自主、误差不累积的自主导航定位方法,提高各类运动体的作业能力。
2、偏振导航方法通过建立大气偏振光场与太阳位置的映射关系来解算空间运动信息,为解决自主导航难题提供了思路。在偏振自主定位领域,已经开展了部分研究。例如,中国专利zl202010874766.8《一种基于偏振位姿信息耦合迭代自主导航定位方法》需要初始位置/姿态进行迭代解算。中国专利zl201810583734.5《一种基于全天域偏振度信息的偏振导航实时定位方法》、中国专利申请cn202210678442.6《一种基于偏振光场时间差分的两步自主定位方法》和中国专利申请cn202210699432.0《一种基于时间序列偏振光场的自主定位方法》同时利用太阳方位角和太阳高度角进行定位,但是要计算地理坐标系下的绝对太阳方位角,需要其他罗盘进行辅助、提供航向信息。中国专利zl201811328952.0《一种基于最大偏振度观测的偏振导航全球自主定位方法》和中国专利zl202111418034.9《一种基于散射角权重分配的仿复眼偏振传感器自主定位方法》提出了两种仅基于太阳高度角的定位方法,无需罗盘辅助,但是在计算过程中会受到常值误差的影响,限制了定位精度。而中国专利申请cn202310465552.9《一种基于空间分布式公有误差抑制的偏振定位方法》虽然通过空间差分抑制了常值误差影响,但是需要布置基站,不适用于单一运动体的导航定位。
技术实现思路
1、为解决上述偏振定位方法大多依赖其他罗盘传感器进行辅助、且容易受到太阳位置中常值误差影响的问题,本发明提出一种基于太阳位置变化率的自主定位方法,通过对太阳高度角与方位角求导,实现了不依赖罗盘辅助的自主定位,并抑制了由太阳位置常值误差引起的定位误差,提高了偏振定位方法在复杂环境下的精度和环境适应性。
2、为达到上述目的,本发明采用的技术方案为:
3、一种基于太阳位置变化率的自主定位方法,其实现步骤如下:
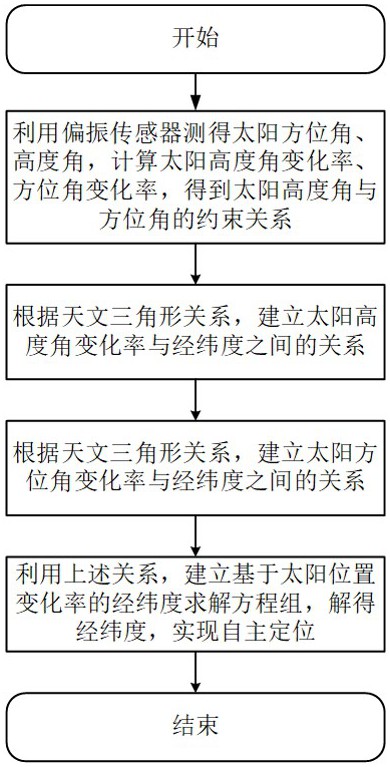
4、步骤(1)、将偏振传感器保持水平,设置解算时间间隔,测得解算时间间隔内载体系下的太阳高度角变化量以及太阳方位角变化量,计算太阳高度角变化率以及太阳方位角变化率;并由天文三角形对应关系以及球面三角形正弦定理得到太阳高度角与太阳方位角之间的约束关系;
5、步骤(2)、根据天文三角形关系,建立太阳高度角变化率与经度、纬度之间的关系;表示太阳高度角变化率与经度、纬度之间的关系函数;
6、步骤(3)、根据天文三角形关系,建立太阳方位角变化率与经度、纬度之间的关系;表示太阳方位角变化率与经度、纬度之间的关系函数;
7、步骤(4)、根据步骤(2)中的太阳高度角变化率与经度、纬度之间的关系和步骤(3)中的太阳方位角变化率与经度、纬度之间的关系,建立基于太阳位置变化率的经纬度求解方程组,解得经度与纬度,实现自主定位。
8、与现有的技术相比,本发明具有以下的有益效果:
9、现有的偏振定位方法大多依赖罗盘辅助,且在实际情况中容易受到太阳位置常值误差的影响,导致定位精度较低。本发明采用太阳高度角和太阳方位角的变化率进行定位,无需罗盘辅助确定绝对航向,并抑制了太阳位置常值误差对定位结果的影响,提高了自主定位精度,实现了不依赖罗盘辅助的全球自主定位。
技术特征:
1.一种基于太阳位置变化率的自主定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于太阳位置变化率的自主定位方法,其特征在于:
3.根据权利要求2所述的一种基于太阳位置变化率的自主定位方法,其特征在于:
4.根据权利要求3所述的一种基于太阳位置变化率的自主定位方法,其特征在于:
5.根据权利要求4所述的一种基于太阳位置变化率的自主定位方法,其特征在于:
技术总结
本发明涉及一种基于太阳位置变化率的自主定位方法,属于偏振光导航领域,首先利用偏振传感器测得太阳方位角、太阳高度角,分别计算太阳高度角变化率以及太阳方位角变化率,并得到太阳高度角与太阳方位角之间的约束关系;然后,根据天文三角形关系,建立太阳高度角变化率与经纬度之间的关系;其次,根据天文三角形关系,建立太阳方位角变化率与经纬度之间的关系;最后,根据上述关系建立基于太阳位置变化率的经纬度求解方程组,并求解得到经纬度,实现全球自主定位。本发明可用于计算载体经纬度,满足无人系统的自主导航定位需求。
技术研发人员:杨健,赵谦,郭雷,胡鹏伟
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!