一种基于行人的IMU二次积分方法与流程
本发明涉及惯性导航,特别是一种基于行人的imu二次积分方法。
背景技术:
1、imu二次积分是惯性导航领域的核心研究内容之一,输入一般为一段时间收集到的imu(inertial measurement unit,惯性测量单元)数据,通过消除imu自身的偏置、噪声、重力等影响因素,一次积分到速度二次积分到位置从而获取搭载设备的轨迹信息,imu二次积分在很多领域有着广泛的应用,如ar/vr、扫地机器人、无人机等需要对设备进行定位的行业。
2、现有的imu二次积分算法,大部分不能独立工作,而且需要和其他传感器,比如相机或者激光雷达等进行融合,导致其精度不高,存在漂移。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种基于行人的imu二次积分方法。
2、本发明的目的通过以下技术方案来实现:一种基于行人的imu二次积分方法,包括以下步骤:
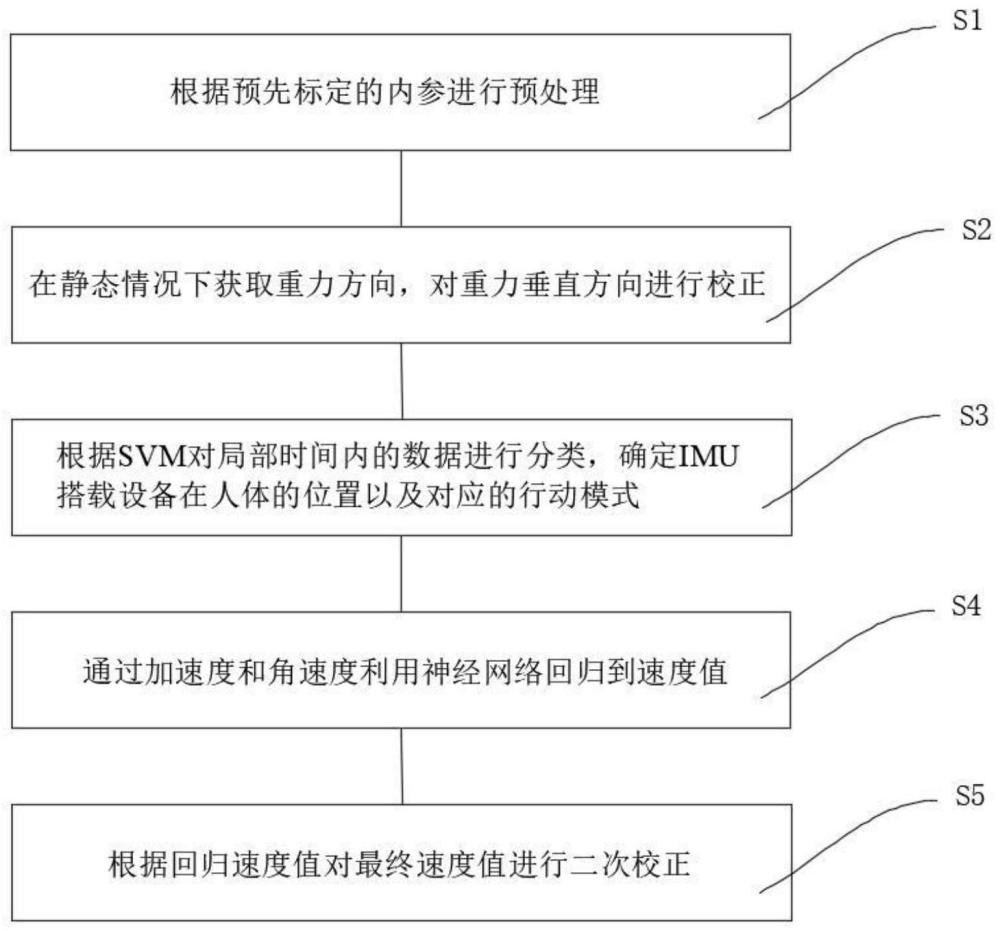
3、s1:根据预先标定的内参进行预处理;
4、s2:在静态情况下获取重力方向,对重力垂直方向进行校正;
5、s3:根据svm对局部时间内的数据进行分类,确定imu搭载设备在人体的位置以及对应的行动模式;
6、s4:通过加速度和角速度利用神经网络回归到速度值;
7、s5:根据回归速度值对最终速度值进行二次校正。
8、优选的,步骤s1中,对加速度计和陀螺仪数据的预处理公式为:
9、
10、其中,x为加速度计或陀螺仪的原始数据,b为加速度计或陀螺仪的固定零偏,k为加速度计或陀螺仪在每个轴上的尺度误差,t为加速度计或陀螺仪在每个轴上的安装旋转误差。
11、优选的,步骤s2中,还包括以下步骤:
12、s21:在静态情况下放置5秒,获得重力在当前imu坐标系下的向量值,
13、
14、其中gi为步骤s1中校正后的加速度计数据,n为5秒内的数据量;
15、s22:对重力向量进行归一化,得到单位方向向量,
16、
17、其中,g为序列图像的总数量;
18、s23:获取静止状态下imu坐标系转到重力为垂直向下方向的旋转轴k和旋转角度θ,
19、
20、其中,gi为预设世界坐标系下重力的方向向量;
21、s24:将旋转向量通过罗德里格斯公式转到旋转矩阵;
22、
23、优选的,步骤s3中,行动模式分为腿部、包内、手部和身体。
24、优选的,步骤s3中,通过标记的数据训练后得到超平面参数,通过输入特征向量判断其分类,公式为:
25、
26、其中,x为输入的特征向量,w为超平面法向量,b为偏移量。
27、优选的,步骤s4中,神经网络的网络结构为一个7*7卷积层、一个批量规范化层和3*3最大汇聚层,后续顺序连接三个残差网络,最后再连接一个全局平均汇聚层和一个全连接层。
28、优选的,残差网络为3*3卷积层、批量规范化层、relu层、3*3卷积层、批量规范化层和relu层,最后的relu层之间直连一个1*1卷积层。
29、优选的,步骤s5中,对步骤s4中的回归速度进行二次校正的公式为:
30、
31、其中,n为第n个校正序列,λ为校正系数,取值范围为[0,1],vr为步骤s4中的回归速度,vc为最终校正的速度,f为imu的采样频率,x为步骤s2中校正后的imu数据。
32、本发明具有以下优点:本发明根据原始imu数据信息,首先对预先标定的内参进行预处理,在静态情况下获取重力方向,从而对重力垂直方向进行校正,再通过svm对局部时间内的数据进行分类,确定imu搭载设备在人体的位置以及行动模式,最后由加速度和角速度通过神经网络回归到速度值,并进行二次校正,从而无需与其他传感器进行融合,可单独工作,同时分析了行人的行为模式,不会造成长时间的漂移。
技术特征:
1.一种基于行人的imu二次积分方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于行人的imu二次积分方法,其特征在于:所述步骤s1中,对加速度计和陀螺仪数据的预处理公式为:
3.根据权利要求2所述的基于行人的imu二次积分方法,其特征在于:所述步骤s2中,还包括以下步骤:
4.根据权利要求3所述的基于行人的imu二次积分方法,其特征在于:所述步骤s3中,行动模式分为腿部、包内、手部和身体。
5.根据权利要求4所述的基于行人的imu二次积分方法,其特征在于:所述步骤s3中,通过标记的数据训练后得到超平面参数,通过输入特征向量判断其分类,公式为:
6.根据权利要求5所述的基于行人的imu二次积分方法,其特征在于:所述步骤s4中,神经网络的网络结构为一个7*7卷积层、一个批量规范化层和3*3最大汇聚层,后续顺序连接三个残差网络,最后再连接一个全局平均汇聚层和一个全连接层。
7.根据权利要求6所述的基于行人的imu二次积分方法,其特征在于:残差网络为3*3卷积层、批量规范化层、relu层、3*3卷积层、批量规范化层和relu层,最后的relu层之间直连一个1*1卷积层。
8.根据权利要求7所述的基于行人的imu二次积分方法,其特征在于:所述步骤s5中,对步骤s4中的回归速度进行二次校正的公式为:
技术总结
本发明公开了一种基于行人的IMU二次积分方法,S1:根据预先标定的内参进行预处理;S2:在静态情况下获取重力方向,对重力垂直方向进行校正;S3:根据SVM对局部时间内的数据进行分类,确定IMU搭载设备在人体的位置以及对应的行动模式;S4:通过加速度和角速度利用神经网络回归到速度值;S5:根据回归速度值对最终速度值进行二次校正。根据原始IMU数据信息,对预先标定的内参进行预处理,在静态情况下获取重力方向,对重力垂直方向进行校正,再通过SVM对局部时间内的数据进行分类,确定行动模式,由加速度和角速度通过神经网络回归到速度值,并进行二次校正,从而无需与其他传感器融合,可单独工作,同时分析了行人的行为模式,不会造成漂移。
技术研发人员:余世杰,王宇琛,肖唐杰,桂仲成
受保护的技术使用者:成都圭目机器人有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!