一种基于机器人的天线罩测试装置及方法与流程
本发明属于天线罩电性能测试,尤其涉及一种基于机器人的天线罩测试装置及方法。
背景技术:
1、现有模拟装机状态的电性能测试是通过转台将天线和天线罩安装在滚环上,设计工装保障天线的转动中心与滚环的滚动中心重合,天线的方位轴、俯仰轴分别与转台的方位轴、俯仰轴同轴,实现天线与天线罩的随动运动状态,保障实现装机状态下天线罩电性能的测试。
2、现有的转台存在非标准化、笨重、控制不灵活等问题。
技术实现思路
1、本发明提供一种基于机器人的天线罩测试装置及方法,实现现有转台测试天线罩电性能状态的功能,提高测试灵活性。
2、为达到上述目的,本发明采用如下技术方案予以实现。
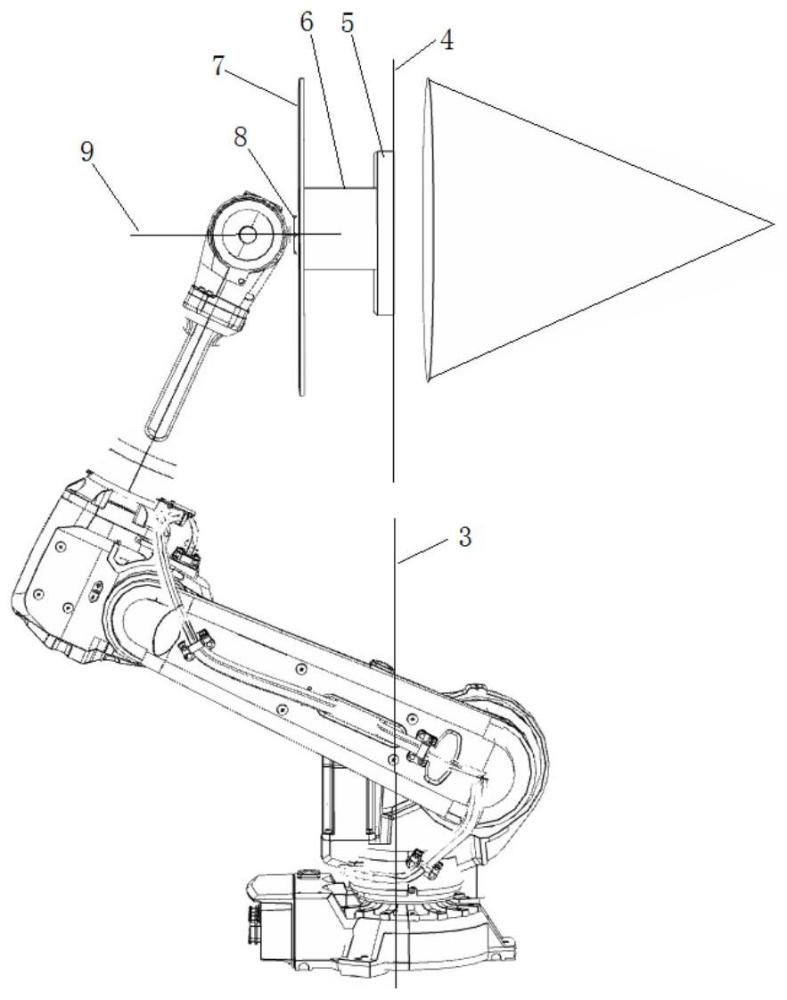
3、一方面,本发明提供一种基于机器人的天线罩测试装置,所述装置包括:天线罩1,机器人2,机器人腰回转轴3,天线方位轴4,天线5,天线座6,天线罩工装夹具7,法兰盘8,机器人手回转轴9;
4、其中,通过天线座6将天线5安装在机器人2的法兰盘8上,通过天线罩工装夹具7将天线罩1安装在机器人2的法兰盘8上;机器人腰回转轴3为机器人方位轴,机器人手回转轴9位机器人滚动轴。
5、进一步的,
6、驱动机器人腰回转轴3在单轴运动模式下运动,实现天线罩和天线的方位运动,此时天线方位轴4和机器人方位轴同轴;
7、驱动机器人手回转轴9在单轴运动模式下运动,实现天线罩和天线的滚动运动,此时天线滚动轴和机器人滚动轴同轴;
8、驱动机器人各轴在线性运动模式下运动,实现天线罩和天线向上和向下运动,此时天线方位轴4和机器人方位轴3同轴,天线俯仰轴和机器人俯仰轴11同轴。
9、第二方面,本发明还提供一种基于机器人的天线罩测试方法,所述测试方法应用于技术方案一所述的测试装置,所述测试方法包括:
10、s1,驱动机器人各轴运动,实现天线和天线罩的全方位运动;
11、s2,根据天线接收数据,确定天线罩电性能。
12、进一步的,s1具体为;
13、s11,通过天线座6和天线罩工装夹具7将天线和天线罩安装在机器人法兰盘8上,通过驱动机器人腰回转轴3在单轴运动模式下运动,实现天线罩和天线的方位运动,天线方位轴4和机器人方位轴3同轴,方位运动角度在机器人示教器上读取;
14、s12,通过示教器驱动机器人手回转轴9单轴运动,实现天线罩和天线的滚动运动,天线和机器人滚动轴同轴,滚动运动角度在机器人示教器上读取;
15、s13,设置天线旋转中心为tcp点;通过驱动机器人各轴在重定向运动模式下运动,实现天线罩和天线的俯仰运动,实现tcp点保持不变,天线和机器人俯仰轴11同轴、方位轴同轴,天线罩俯仰运动角度在机器人示教器上读取;
16、s14,驱动机器人各轴在线性运动模式下运动,实现天线罩和天线向上和向下运动,而天线方位轴4和机器人方位轴3同轴,天线俯仰轴和机器人俯仰轴11同轴。
17、进一步的,s11中,所述天线罩和天线的方位扫描范围为-180°~180°。
18、进一步的,s12中,所述天线罩和天线的滚动扫描范围为0°~360°。
19、进一步的,s1中,当天线相对天线罩有偏置角时,s11中,通过操作天线座实现天线相对天线罩的偏置角度。
20、进一步的,s2之后,所述方法还包括:驱动机器人各轴使天线罩和天线降低,实现方便安装和拆卸。
21、本发明技术方案利用机器人的功能特征保障天线和机器人方位轴同轴、俯仰轴同轴、滚动轴同轴,实现了天线、天线罩方位扫描、俯仰角偏置、上下运动等功能,可满足天线和天线罩随动状态的方向图、传输效率测试,将天线座安装在法兰盘上,天线安装在天线座上,可实现瞄准误差的测试。驱动各轴将天线罩降低到指定的区域和高度,可实现在适宜的高度安装或卸载天线罩,可省去安装升降平台。本发明可实现转台、天线座测试天线罩的功能。
技术特征:
1.一种基于机器人的天线罩测试装置,其特征在于,所述装置包括:天线罩1,机器人2,机器人腰回转轴3,天线方位轴4,天线5,天线座6,天线罩工装夹具7,法兰盘8,机器人手回转轴9;
2.根据权利要求1所述的一种基于机器人的天线罩测试装置,其特征在于,
3.一种基于机器人的天线罩测试方法,其特征在于,所述测试方法应用于如权利要求1-2中任一项所述的测试装置,所述测试方法包括:
4.根据权利要求3所述的一种基于机器人的天线罩测试方法,其特征在于,s1具体为;
5.根据权利要求4所述的一种基于机器人的天线罩测试方法,其特征在于,s11中,所述天线罩和天线的方位扫描范围为-180°~180°。
6.根据权利要求4所述的一种基于机器人的天线罩测试方法,其特征在于,s12中,所述天线罩和天线的滚动扫描范围为0°~360°。
7.根据权利要求4所述的一种基于机器人的天线罩测试方法,其特征在于,s1中,当天线相对天线罩有偏置角时,s11中,通过操作天线座实现天线相对天线罩的偏置角度。
8.根据权利要求4所述的一种基于机器人的天线罩测试方法,其特征在于,s2之后,所述方法还包括:驱动机器人各轴使天线罩和天线降低,实现方便安装和拆卸。
技术总结
本发明属于天线罩电性能测试技术领域,公开了一种基于机器人的天线罩测试装置及方法,包括:天线罩1,机器人2,机器人腰回转轴3,天线方位轴4,天线5,天线座6,天线罩工装夹具7,法兰盘8,机器人手回转轴9;其中,通过天线座6将天线5安装在机器人2的法兰盘8上,通过天线罩工装夹具7将天线罩1安装在机器人2的法兰盘8上;机器人腰回转轴3为机器人方位轴,机器人手回转轴9为机器人滚动轴,实现现有转台测试天线罩电性能状态的功能,提高测试灵活性。
技术研发人员:蒋小杰,李传兰
受保护的技术使用者:中国航空工业集团公司济南特种结构研究所
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!