基于自适应栅格重构的异构网络化雷达空间配准方法
本发明属于雷达,具体涉及一种基于自适应栅格重构的异构网络化雷达空间配准方法。
背景技术:
1、网络化雷达空间配准将不同雷达站观测到同一目标的观测进行关联,是保证融合检测准确实施的重要前提。
2、目前基于栅格划分的空间配准方法面临着数据关联组合较多重复,栅格标定点选择非最优和缺少一定空间配准评价指标下最优栅格大小的求解等问题,会导致实际应用中配准误差较大,系统计算负担过重以及融合检测性能损失等后果。
3、因此,亟需提供一种雷达空间配准方法,减小实际应用中配准误差。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于自适应栅格重构的异构网络化雷达空间配准方法。本发明要解决的技术问题通过以下技术方案实现:
2、第一方面,本发明提供一种基于自适应栅格重构的异构网络化雷达空间配准方法,包括:
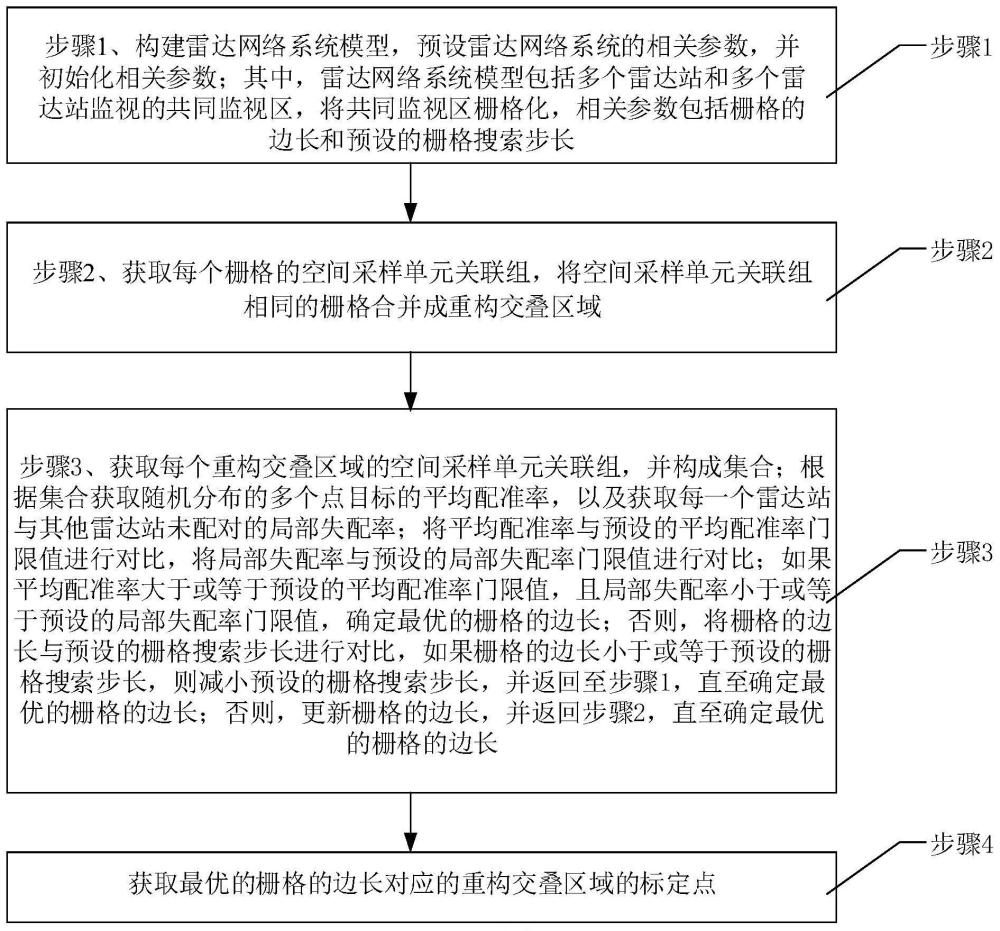
3、步骤1、构建雷达网络系统模型,预设雷达网络系统的相关参数,并初始化相关参数;其中,雷达网络系统模型包括多个雷达站和多个雷达站监视的共同监视区,将共同监视区栅格化,相关参数包括栅格的边长和预设的栅格搜索步长;
4、步骤2、获取每个栅格的空间采样单元关联组,将空间采样单元关联组相同的栅格合并成重构交叠区域;
5、步骤3、获取每个重构交叠区域的空间采样单元关联组,并构成集合;根据集合获取随机分布的多个点目标的平均配准率,以及获取每一个雷达站与其他雷达站未配对的局部失配率;将平均配准率与预设的平均配准率门限值进行对比,将局部失配率与预设的局部失配率门限值进行对比;如果平均配准率大于或等于预设的平均配准率门限值,且局部失配率小于或等于预设的局部失配率门限值,确定最优的栅格的边长;否则,将栅格的边长与预设的栅格搜索步长进行对比,如果栅格的边长小于或等于预设的栅格搜索步长,则减小预设的栅格搜索步长,并返回至步骤1,直至确定最优的栅格的边长;否则,更新栅格的边长,并返回步骤2,直至确定最优的栅格的边长;
6、步骤4、获取最优的栅格的边长对应的重构交叠区域的标定点。
7、本发明的有益效果:
8、本发明提供的一种基于自适应栅格重构的异构网络化雷达空间配准方法,通过对网络化雷达共同监视区域栅格化,近似重构局部雷达站空间采样单元交叠区域,实现计算负担的减少,并搜索配准重复的栅格中心的费马点作为重构区域标定点,实现配准误差的优化;之后通过引入平均配准率和局部失配率作为配准性能评价指标,给出综合考虑计算负担和空间配准性能的优化模型,实现栅格边长的最优化。
9、以下将结合附图及实施例对本发明做进一步详细说明。
技术特征:
1.一种基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,包括:
2.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,所述获取每个栅格的空间采样单元关联组,将所述空间采样单元关联组相同的栅格合并成重构交叠区域,包括:
3.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,所述获取每个所述重构交叠区域的空间采样单元关联组,并构成集合,包括:
4.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,所述根据所述集合获取随机分布的多个点目标的平均配准率,包括:
5.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,所述获取每一个所述雷达站与其他所述雷达站未配对的局部失配率,包括:
6.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,所述更新所述栅格的边长,包括:
7.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,还包括:对所述最优的栅格的边长对应的所述重构交叠区域的标定点的坐标进行优化;
8.根据权利要求1所述的基于自适应栅格重构的异构网络化雷达空间配准方法,其特征在于,还包括:返回空间配准信息检索表、重构交叠区域分布图和配准位置分布图;
技术总结
本发明公开了一种基于自适应栅格重构的异构网络化雷达空间配准方法,包括:步骤1、构建雷达网络系统模型,预设雷达网络系统的相关参数,并初始化相关参数;步骤2、获取每个栅格的空间采样单元关联组,将空间采样单元关联组相同的栅格合并成重构交叠区域;步骤3、获取每个重构交叠区域的空间采样单元关联组,并构成集合;根据集合获取随机分布的多个点目标的平均配准率,以及获取每一个雷达站与其他雷达站未配对的局部失配率;如果平均配准率大于或等于预设的平均配准率门限值,且局部失配率小于或等于预设的局部失配率门限值,确定最优的栅格的边长;步骤4、获取最优的栅格的边长对应的重构交叠区域的标定点。本发明有效提高了配准精度。
技术研发人员:高畅,谷丰登,刘宏伟,贾天一,王蓉蓉
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!