一种基于A星搜索和CBS算法的多机器人追逃避障方法
本发明涉及机器人协作领域,尤其涉及一种基于a星搜索和cbs算法的多机器人追逃避障方法。
背景技术:
1、随着人工智能技术的迅猛发展,机器人在越来越多的领域中得到应用,在救援、勘探、侦查和飞行器编队作战等实际应用过程中,机器人之间需要互相协同完成任务,进而延伸出了多机器人追逃问题。目前用于解决多机器人追逃问题的追捕算法大多采用强化学习方法,虽然强化学习理论上可以用于未知环境,但通用性也带来了高样本需求的问题。这意味着需要大量的样本来训练追捕策略,导致训练成本显著增加。因此,在实际应用中,如果资源有限,这些算法可能难以实施。
技术实现思路
1、有鉴于此,为了解决现有多机器人追逃避障方法中依赖于大量的样本来训练追捕策略,进而难以在资源有限的情况下完成规划的问题,第一方面,本发明提出一种基于a星搜索和cbs算法的多机器人追逃避障方法,所述方法包括以下步骤:
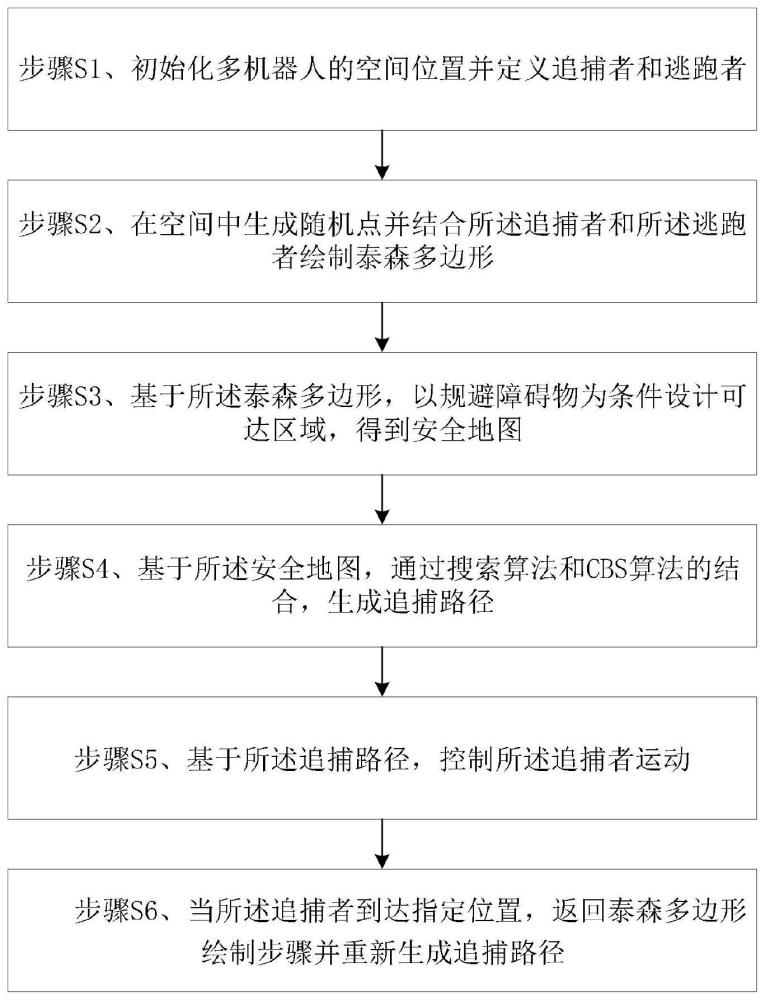
2、初始化多机器人的空间位置并定义追捕者和逃跑者;
3、在空间中生成随机点并结合所述追捕者和所述逃跑者绘制泰森多边形;
4、基于所述泰森多边形,以规避障碍物为条件设计可达区域,得到安全地图;
5、基于所述安全地图,通过搜索算法和cbs算法的结合,生成追捕路径;
6、基于所述追捕路径,控制所述追捕者运动。
7、在一些实施例中,还包括:
8、当所述追捕者到达指定位置,返回泰森多边形绘制步骤并重新生成追捕路径。
9、通过该优选步骤,可以设定为每隔一段时间/距离即重新搜索追捕路径,以便应对逃跑者的快速运动。
10、在一些实施例中,所述在空间中生成随机点并结合所述追捕者和所述逃跑者绘制泰森多边形这一步骤,其具体包括:
11、基于空间中的障碍物位置,设定无障碍区域和障碍物区域;
12、在所述无障碍区域生成稀疏的随机点;
13、在所述障碍物区域生成密集的随机点;
14、基于所述随机点、所述追捕者和所述逃跑者绘制泰森多边形。
15、通过该优选步骤,根据随机点生成疏密有致的泰森多边形。可以调整随机点生成疏密来控制泰森多边形的疏密程度,以达到更加精细的避障功能。
16、在一些实施例中,所述基于所述泰森多边形,以规避障碍物为条件设计可达区域,得到安全地图这一步骤,其具体包括:
17、基于空间中的障碍物位置,将障碍物外扩预设距离,得到外扩多边形;
18、删除所述外扩多边形内的泰森多边形,得到安全地图。
19、通过该优选步骤,删除外扩多边形内随机点生成的泰森多边形,为机器人提供安全避障区域,以适应多种类型和形状的障碍物,包括各种凸多边形和凹多边形。
20、在一些实施例中,所述基于所述安全地图,通过搜索算法和cbs算法的结合,生成追捕路径这一步骤,其具体包括:
21、基于所述安全地图,通过a星搜索算法生成初始路径;
22、基于cbs算法判断所有追捕者的初始路径是否存在冲突,若存在冲突,建立新约束并重新执行a星搜索算法,直至所有追捕者的初始路径不存在冲突,得到追捕路径。
23、通过该优选步骤,选用典型的启发式搜索算法作为初始路径的搜索;进一步结合cbs算法,通过考虑智能体之间的冲突以及它们的个体目标,来寻找一组最优的、不会相互干扰的路径。
24、在一些实施例中,所述冲突具体为:在所述初始路径中规划的某一时刻,存在至少两个所述追捕者之间的距离少于预设值。
25、在一些实施例中,所述基于所述安全地图,通过搜索算法和cbs算法的结合,生成追捕路径这一步骤,其具体包括:
26、基于所述安全地图,通过a星搜索算法生成初始路径;
27、基于cbs算法判断所有追捕者在初始路径中的下一目标点是否存在冲突,若存在冲突,则根据路径成本从小到大依次解决冲突,对成本大的追捕者重新进行a星搜索算法,直至所有追捕者都存在不冲突的下一目标点。
28、通过该优选步骤,考虑到逃跑者是移动的,故选择在追捕者每移动一次后就重新通过a星搜索确定下一步移动的目标点,并在cbs高层判断得到所有追捕者的目标点是否有冲突。
29、第二方面,本发明还提出了一种基于a星搜索和cbs算法的多机器人追逃避障系统,所述系统包括:
30、初始化模块,用于初始化多机器人的空间位置并定义追捕者和逃跑者;
31、泰森多边形绘制模块,用于在空间中生成随机点并结合所述追捕者和所述逃跑者绘制泰森多边形;
32、安全地图构建模块,基于所述泰森多边形,以规避障碍物为条件设计可达区域,得到安全地图;
33、路径生成模块,基于所述安全地图,通过搜索算法和cbs算法的结合,生成追捕路径;
34、控制运动模块,基于所述追捕路径,控制所述追捕者运动。
35、基于上述方案,本发明提供了一种基于a星搜索和cbs算法的多机器人追逃避障方法,通过使用泰森多边形划分空间并基于a星搜索算法规划路径,本发明不依赖大规模的强化学习样本,降低了训练成本;进一步结合cbs和a星搜索,过在有界区域内循环解决冲突,以帮助机器人设计更优的追捕路线。
技术特征:
1.一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,还包括:
3.根据权利要求1所述一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,所述在空间中生成随机点并结合所述追捕者和所述逃跑者绘制泰森多边形这一步骤,其具体包括:
4.根据权利要求1所述一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,所述基于所述泰森多边形,以规避障碍物为条件设计可达区域,得到安全地图这一步骤,其具体包括:
5.根据权利要求1所述一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,所述基于所述安全地图,通过搜索算法和cbs算法的结合,生成追捕路径这一步骤,其具体包括:
6.根据权利要求5所述一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,所述冲突具体为:在所述初始路径中规划的某一时刻,存在至少两个所述追捕者之间的距离少于预设值。
7.根据权利要求1所述一种基于a星搜索和cbs算法的多机器人追逃避障方法,其特征在于,所述基于所述安全地图,通过搜索算法和cbs算法的结合,生成追捕路径这一步骤,其具体包括:
8.一种多机器人追逃避障系统,其特征在于,应用于如权利要求1所述的一种基于a星搜索和cbs算法的多机器人追逃避障方法,包括:
技术总结
本发明公开了一种基于A星搜索和CBS算法的多机器人追逃避障方法,该方法包括:初始化多机器人的空间位置并定义追捕者和逃跑者;在空间中生成随机点并结合所述追捕者和所述逃跑者绘制泰森多边形;基于所述泰森多边形,以规避障碍物为条件设计可达区域,得到安全地图;基于所述安全地图,通过搜索算法和CBS算法的结合,生成追捕路径;基于所述追捕路径,控制所述追捕者运动。通过使用本发明,无需依赖大规模的训练样本完成多机器人追逃避障的设计。本发明可广泛应用于机器人协作领域。
技术研发人员:单云霄,林金希,张馨怡,陈亚倩,陈伊蕊
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!