一种机器人导航数据更新方法、装置、芯片及终端与流程
本发明涉及图像处理和计算机视觉,特别是涉及一种机器人导航数据更新方法、装置、芯片及终端。
背景技术:
1、同步定位与地图构建技术,用于感知机器人的周围环境,是实现机器人自主导航和后续交互的关键技术之一,极大地扩展了机器人在现实生活中的应用范围。同步定位与地图构建技术需要解决两个核心问题:定位和建图。定位是指机器人需要确定自己在空间中的位置,而建图则是机器人需要构建周围环境的地图。
2、高程图为机器人提供了一种高效的、简单而强大的几何表示。机器人可以利用这些信息在未知环境中导航,或在崎岖地形上进行感知运动控制。但是,高程图的纯几何信息难以提高机器人对当前环境的理解程度与准确性,使得机器人无法应用在复杂的场景中。
技术实现思路
1、基于此,本发明提供一种机器人导航数据更新方法、装置、芯片及终端,可以提高机器人在复杂场景中的环境理解程度与准确性,使其在自主导航和后续交互方面具有同样的决策效率。
2、第一方面,提供一种机器人导航数据更新方法,包括:
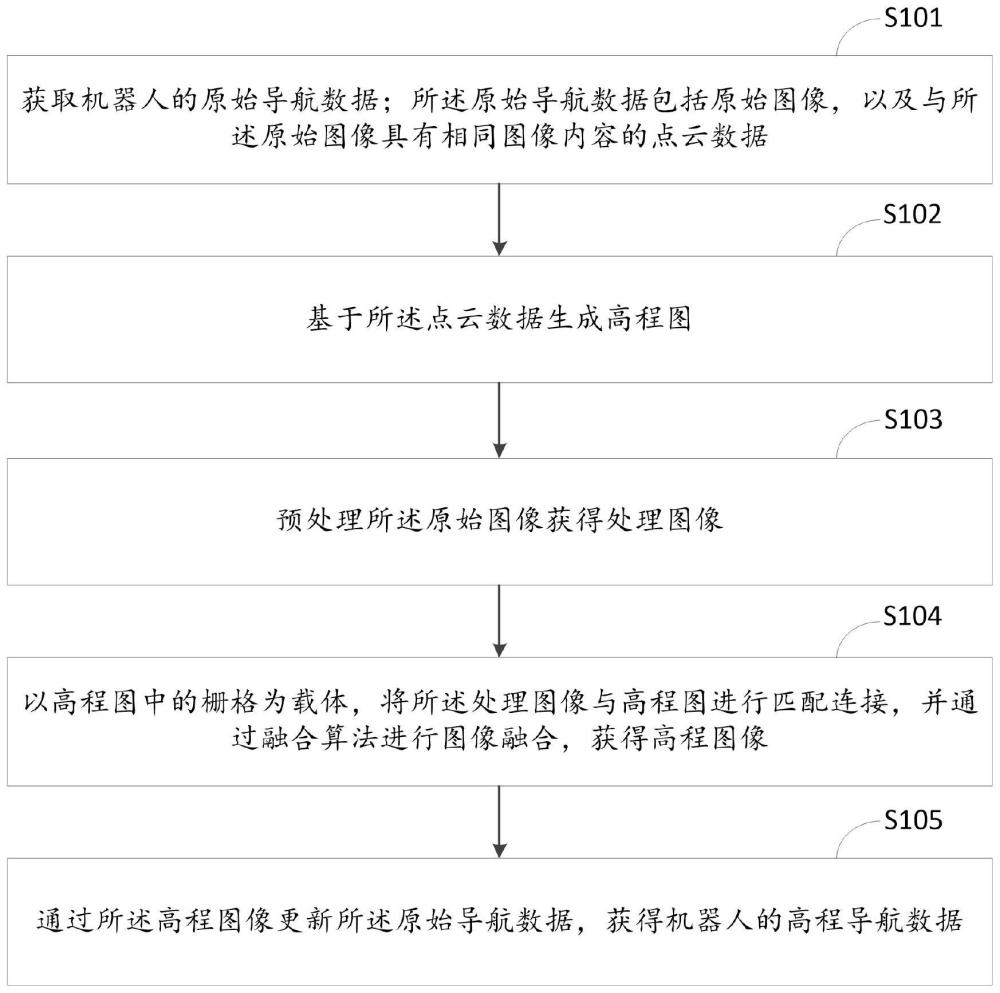
3、获取机器人的原始导航数据;所述原始导航数据包括原始图像,以及与所述原始图像具有相同图像内容的点云数据;
4、基于所述点云数据生成高程图;
5、预处理所述原始图像获得处理图像;
6、以高程图中的栅格为载体,将所述处理图像与高程图进行匹配连接,并通过融合算法进行图像融合,获得高程图像;
7、通过所述高程图像更新所述原始导航数据,获得机器人的高程导航数据。
8、可选地,将所述处理图像与高程图进行匹配连接,包括:
9、在高程图的xy平面上平均划分多个栅格;
10、获取所述处理图像的四个像素顶点,匹配连接到xy平面上划分的栅格中,匹配连接后的栅格构成图像区域,所述图像区域包括n个栅格,n个栅格与处理图像的像素点匹配;
11、对于第n个栅格,计算其高度方差,n为小于或者等于n的正整数,n为正整数;
12、根据所述高度方差设置所述第n个栅格为水平栅格或垂直栅格。
13、可选地,若第n个栅格为垂直栅格,通过观测夹角调整所述第n个栅格的图像融合,所述观测夹角为物体的中心到观测点的连线与物体可视侧的边界到观测点的连线的夹角。
14、可选地,若第n个栅格为垂直栅格,包括至少两个观测夹角,且所述观测夹角的角度大于0。
15、可选地,通过观测夹角调整所述第n个栅格的图像融合时,观测夹角作为权值的计算公式为:
16、表示第n个栅格为物体第一可视侧边界与观测点的连线所对应的栅格;
17、或者,
18、表示第n个栅格为物体第二可视侧边界与观测点的连线所对应的栅格;
19、其中,α1为物体的中心到观测点的连线与物体第一可视侧边界到观测点的连线的夹角,α2为物体的中心到观测点的连线与物体第二可视侧边界到观测点的连线的夹角,第一可视侧和第二可视侧为相邻侧。
20、可选地,所述四个像素顶点构成梯形结构。
21、可选地,不同原始图像包括不同的多模态信息,预处理所述原始图像获得处理图像之前,包括:根据原始图像的类型选择预处理方法获得处理图像。
22、第二方面,提供一种机器人导航数据更新装置,包括:
23、原始导航数据获取模块,用于获取机器人的原始导航数据;所述原始导航数据包括原始图像,以及与所述原始图像具有相同图像内容的点云数据;
24、高程图生成模块,用于基于所述点云数据生成高程图;
25、预处理模块,用于预处理所述原始图像获得处理图像;
26、匹配连接融合模块,用于以高程图中的栅格为载体,将所述处理图像与高程图进行匹配连接,并通过融合算法进行图像融合,获得高程图像;
27、数据更新模块,用于通过所述高程图像更新所述原始导航数据,获得机器人的高程导航数据。
28、第三方面,提供一种芯片,包括第一处理器,用于从第一存储器中调用并运行计算机程序,使得安装有所述芯片的设备执行如权利要求1至7任一项所述的机器人导航数据更新方法的各个步骤。
29、第四方面,提供一种终端,包括第二存储器、第二处理器以及存储在所述第二存储器中并可在所述第二处理器上运行的计算机程序,第二处理器执行所述计算机程序时实现如上介绍的机器人导航数据更新方法的各个步骤。
30、上述机器人导航数据更新方法、装置、芯片及终端,通过原始图像获得多模态信息,通过点云数据生成高程图,然后以高程图中的栅格为载体,将两者进行匹配连接和图像融合,从而将基于原始图像获得的多模态信息与高程图获得的地形信息进行融合,克服高程图的纯几何信息所带来的误差和误判,从而提高机器人在复杂场景中的环境理解程度与准确性,使其在自主导航和后续交互方面具有同样的决策效率。
技术特征:
1.一种机器人导航数据更新方法,其特征在于,包括:
2.如权利要求1所述的机器人导航数据更新方法,其特征在于,将所述处理图像与高程图进行匹配连接,包括:
3.如权利要求2所述的机器人导航数据更新方法,其特征在于,若第n个栅格为垂直栅格,通过观测夹角调整所述第n个栅格的图像融合,所述观测夹角为物体的中心到观测点的连线与物体可视侧的边界到观测点的连线的夹角。
4.如权利要求3所述的机器人导航数据更新方法,其特征在于,若第n个栅格为垂直栅格,包括至少两个观测夹角,且所述观测夹角的角度大于0。
5.如权利要求4所述的机器人导航数据更新方法,其特征在于,通过观测夹角调整所述第n个栅格的图像融合时,观测夹角作为权值的计算公式为:
6.如权利要求2所述的机器人导航数据更新方法,其特征在于,所述四个像素顶点构成梯形结构。
7.如权利要求1所述的机器人导航数据更新方法,其特征在于,不同原始图像包括不同的多模态信息,预处理所述原始图像获得处理图像之前,包括:
8.一种机器人导航数据更新装置,其特征在于,包括:
9.一种芯片,其特征在于,包括:第一处理器,用于从第一存储器中调用并运行计算机程序,使得安装有所述芯片的设备执行如权利要求1至7任一项所述的机器人导航数据更新方法的各个步骤。
10.一种终端,其特征在于,包括第二存储器、第二处理器以及存储在所述第二存储器中并可在所述第二处理器上运行的计算机程序,其特征在于,所述第二处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的机器人导航数据更新方法的步骤。
技术总结
本发明实施例公开了一种机器人导航数据更新方法、装置、芯片和终端,方法包括:获取机器人的原始导航数据;原始导航数据包括原始图像,以及与原始图像具有相同图像内容的点云数据;基于点云数据生成高程图;预处理原始图像获得处理图像;以高程图中的栅格为载体,将处理图像与高程图进行匹配连接,并通过融合算法进行图像融合,获得高程图像;通过高程图像更新原始导航数据,获得机器人的高程导航数据。通过本发明可以基于原始图像获得的多模态信息,并与高程图获得的地形信息进行融合,克服高程图的纯几何信息所带来的误差和误判。
技术研发人员:朱冬,宋雯,方向明,唐国梅,张建,燕帅成,仲元红
受保护的技术使用者:七腾机器人有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!