数据处理方法、装置、电子设备、通信系统及存储介质与流程
本申请涉及人工智能,具体而言,涉及一种数据处理方法、装置、电子设备、通信系统及存储介质。
背景技术:
1、毫米波雷达,是在毫米波波段探测的雷达。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。
2、与厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标。目前,毫米波雷达多数用于室内人体定位、跟踪和识别等应用。
3、激光雷达即时定位与地图构建(simultaneous localization and mapping,slam)算法可以实现机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。激光雷达slam算法可以在环境中筛选出静态物体。
4、由于毫米波雷达与激光雷达各有优势,因此两种雷达大都根据自身优势应用在相应的领域中,例如毫米波雷达更多的应用在目标追踪领域,激光雷达更多的应用在智能机器人领域,导致毫米波雷达和激光雷达slam算法独立使用,难以提供更好的用户服务。
技术实现思路
1、本申请提供了一种数据处理方法、装置、电子设备、通信系统及存储介质,以至少解决现有技术中毫米波雷达和激光雷达slam算法无法结合使用以提供更好的用户服务的技术问题。
2、根据本申请实施例的第一个方面,提供了一种数据处理方法,所述方法包括:
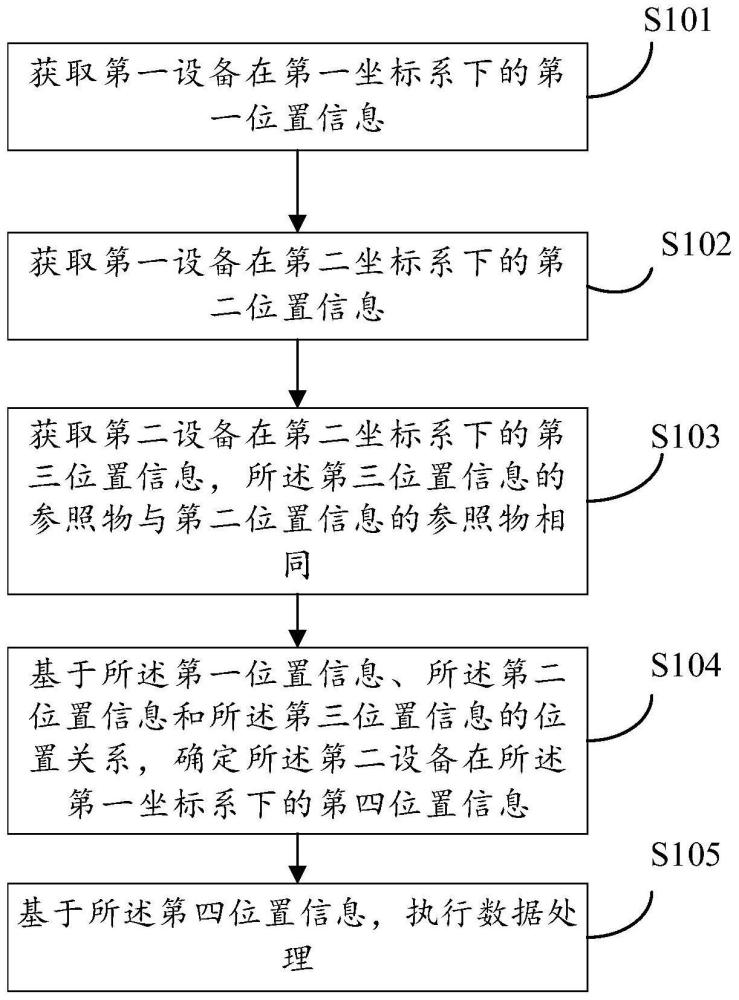
3、获取第一设备在第一坐标系下的第一位置信息;
4、获取第一设备在第二坐标系下的第二位置信息;
5、获取第二设备在第二坐标系下的第三位置信息,所述第三位置信息的参照物与所述第二位置信息的参照物相同;
6、基于所述第一位置信息、所述第二位置信息和所述第三位置信息的位置关系,确定所述第二设备在所述第一坐标系下的第四位置信息;
7、基于所述第四位置信息,执行数据处理。
8、本申请实施例还提供一种数据处理装置,所述装置包括:
9、第一获取模块,用于获取第一设备在第一坐标系下的第一位置信息;
10、第二获取模块,用于获取第一设备在第二坐标系下的第二位置信息;
11、第三获取模块,用于获取第二设备在第二坐标系下的第三位置信息,所述第三位置信息的参照物与第二位置信息的参照物相同;
12、确定模块,用于基于所述第一位置信息、所述第二位置信息和所述第三位置信息的位置关系,确定所述第二设备在所述第一坐标系下的第四位置信息;
13、处理模块,用于基于所述第四位置信息,执行数据处理。
14、本申请实施例还提供一种电子设备,所述电子设备包括:
15、存储器,用于存储一条或多条计算机指令;
16、处理器,用于从所述存储器中调用和执行所述计算机指令,以实现本申请实施例提供的数据处理方法。
17、本申请实施例还提供一种通信系统,所述通信系统包括:
18、第一设备和第二设备;
19、数据处理装置,采用本申请实施例提供的数据处理方法进行数据处理;
20、其中,所述数据处理装置是所述第二设备或所述第一设备的一部分,或,所述数据处理装置是与所述第二设备和所述第一设备通信连接的服务器。
21、本申请实施例还提供一种计算机存储介质,所述计算机存储介质存储有计算机程序,所述计算机程序运行时执行本申请提供的数据处理方法。
22、在这些实施方式中,通过获取第一设备在第一坐标系下的第一位置信息和第二坐标系下的第二位置信息,以及第二设备在第二坐标系下的第三位置信息,利用第一位置信息、第二位置信息和第三位置信息确定第二设备在第一坐标系下的第四位置信息,实现第二设备在第一坐标系下的定位。使得第一设备与第二设备之间的数据能够融合使用,提高了数据的准确性和/或质量,从而使得后续的数据处理更加高效和/或精确,便于提高更好的用户服务。以包含有激光雷达的移动机器人作为第一设备,毫米波雷达作为第二设备为例,由于毫米波雷达能够融合移动机器人的数据,有助于毫米波雷达对需要检测的空间或者目标物更加了解,也就是毫米波雷达得到了更多可使用的数据,从而便于毫米波雷达提供更加准确的追踪或定位服务。
技术特征:
1.一种数据处理方法,其特征在于,所述方法包括:
2.如权利要求1所述的数据处理方法,其特征在于,所述基于所述第一位置信息、所述第二位置信息和所述第三位置信息的位置关系,确定所述第二设备在所述第一坐标系下的第四位置信息,包括:
3.如权利要求2所述的数据处理方法,其特征在于,所述第四位置信息包括:坐标和朝向;
4.如权利要求1所述的数据处理方法,其特征在于,所述基于所述第一位置信息、所述第二位置信息和所述第三位置信息的位置关系,确定所述第二设备在所述第一坐标系下的第四位置信息,包括:
5.如权利要求4所述的数据处理方法,其特征在于,所述第四位置信息包括:坐标和朝向;
6.如权利要求5所述的数据处理方法,其特征在于,所述根据所述第二设备相对所述第一设备的所述平面距离和所述水平角,以及所述第一位置信息,确定所述第二设备在所述第一坐标系下的第四位置信息中的坐标,包括:
7.如权利要求1所述的数据处理方法,其特征在于,所述第一设备包括具有自定位功能的移动设备;
8.如权利要求7所述的数据处理方法,其特征在于,所述方法还包括:
9.如权利要求8所述的数据处理方法,其特征在于,所述确定从第一时间点到第二时间点,第二坐标系下的第三设备在第二坐标系下的移动距离,为第一移动距离,包括:
10.如权利要求1所述的数据处理方法,其特征在于,所述基于所述第四位置信息,执行数据处理,包括:
11.如权利要求10所述的数据处理方法,其特征在于,所述基于所述第四位置信息,执行数据处理,还包括:
12.如权利要求10所述的数据处理方法,其特征在于,
13.如权利要求1或10所述的数据处理方法,其特征在于,所述基于所述第四位置信息,执行数据处理,包括:
14.一种数据处理装置,其特征在于,所述装置包括:
15.一种电子设备,其特征在于,所述电子设备包括:
16.一种通信系统,其特征在于,所述通信系统包括:
17.一种计算机存储介质,其特征在于,所述计算机存储介质存储有计算机程序,所述计算机程序运行时执行如权利要求1-13中任一项所述的方法。
技术总结
本申请提供一种数据处理方法,涉及人工智能技术领域,所述方法包括:获取第一设备在第一坐标系下的第一位置信息;获取第一设备在第二坐标系下的第二位置信息;获取第二设备在第二坐标系下的第三位置信息,所述第三位置信息的参照物与第二位置信息的参照物相同;基于所述第一位置信息、所述第二位置信息和所述第三位置信息的位置关系,确定所述第二设备在所述第一坐标系下的第四位置信息;基于所述第四位置信息,执行数据处理。这样可以结合两个设备的数据,进行数据处理,从而提供更好的用户服务,本申请还提供了一种数据处理装置、电子设备和通信系统。
技术研发人员:韩洋,孔丽,游延筠,傅春
受保护的技术使用者:深圳绿米联创科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!