一种基于匹配性度量的MIMO雷达天线快速校准方法与流程
本发明涉及一种多发多收(multiinput multi output,下文简称mimo)雷达天线的校准方法。
背景技术:
1、对于mimo雷达,由于有源馈线误差、加工工艺精度等原因,天线之间存在幅度和相位不一致性。另外,天线的幅相特性在不同角度上表现各异,导致实际的阵列导向矢量和理论阵列流形出现误差,进而影响测角性能,包括角度分辨力、主副瓣比以及测角精度等。
2、针对这种问题,目前常用做法为在雷达视场(field of view,下文简称fov)内,获取目标在各个角度上的回波,基于回波计算天线通道间的幅度和相位误差,对所有天线进行逐角度校准。然而这种方法耗时较长,难以实现批量校准。另一种常见做法为只测量零度回波,然后基于理论模型推导其他角度上的相位误差。但理论模型与实际无法完全相符,此外,由于人为安装等因素,使所获得的零度回波与真实的零度回波之间存在偏移,最终导致雷达测角出现误差。
技术实现思路
1、本发明要解决的技术问题是:现有的mimo雷达天线的校准方法要么难以实现批量校准,要么会导致雷达测角出现误差。
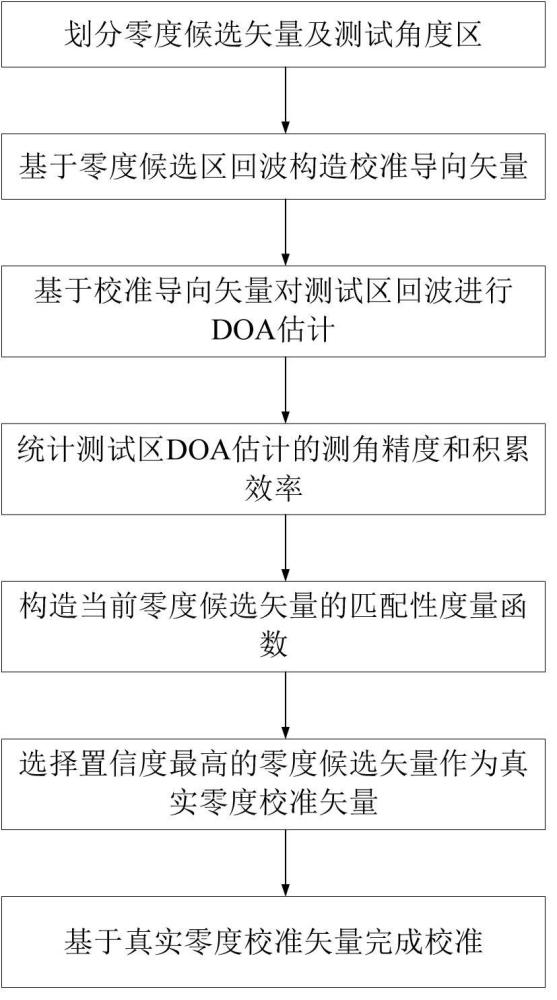
2、为了解决上述技术问题,本发明的技术方案是提供了一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,包括以下步骤:
3、步骤1、在待校准的非标准件雷达视场内划分零度候选区和测试区;
4、步骤2、获取目标在零度候选区的雷达回波数据及测试区的雷达回波数据;
5、步骤3、基于零度候选区的雷达回波数据以及基准校准矩阵构造当前非标准件雷达的每个候选零度的候选校准矩阵,其中,将从零度候选区中取出的第i个候选零度的候选校准矩阵表示为;
6、步骤4、通过候选校准矩阵对测试区内每个测试角度的回波进行角度估计后,取出第j个测试角度对应的测试回波,计算候选校准矩阵与的向量积,得到第j个测试角度的功率谱;
7、步骤5、基于功率谱,计算每个测试角度的积累效率以及每个测试角度的角度估计误差;
8、步骤6、评估在第i个候选零度校准下,候选校准矩阵在所有测试角度上的测角性能,包括积累效率比例和测角误差比例;
9、步骤7、从零度候选区中选择真实零度,包括以下步骤:
10、步骤701、将积累效率比例和测角误差比例加权,构造匹配性度量函数;
11、步骤702、计算匹配性度量函数取最大值时对应的真实零度;
12、步骤8、得到真实零度后,使用真实零度对应的候选校准矩阵作为当前非标准件雷达的快速校准矩阵,将此快速校准矩阵作为导向矢量进行下一步的波达方向估计,完成快速校准。
13、优选地,步骤1中,划分零度候选区和测试区的基准为:选择雷达法向零度周围的小角度作为零度候选区,边缘大角度作为测试区。
14、优选地,步骤3中,所述基准校准矩阵采用以下步骤获得:
15、从与待校准的非标准件雷达相同型号的雷达中随机选取一台作为标准件雷达;在微波暗室中将标准件雷达安装于转台,在标准件雷达正前方向放置稳定信号源;转动转台,获取目标位于标准件雷达视场内每个角度上的回波,并基于各角度的回波构造相同型号雷达的基准校准矩阵:
16、
17、式中,为雷达视场内的量化角度数量。
18、优选地,步骤3中,构造候选校准矩阵包括以下步骤:
19、步骤301、取基准校准矩阵中零度对应的一列,构造误差剔除项,其中:,,为发射天线数量,为接收天线数量;为角度上的回波,;
20、步骤302、构造零度回波矩阵,其中:;为第i个候选零度的雷达回波数据,;
21、计算基准校准矩阵和零度回波矩阵的哈达玛积:
22、
23、式中,为的共轭,表示的幅度。
24、优选地,步骤4中,所述第j个测试角度的功率谱采用下式计算:
25、
26、式中,为的共轭转置矩阵。
27、优选地,步骤5中,第j个测试角度的积累效率表示为,则有:
28、
29、式中:为第j个测试角度的功率谱的功率谱最大值,;,为发射天线数量,为接收天线数量。
30、优选地,步骤5中,第j个测试角度的角度估计误差表示为,则有:
31、
32、式中,为第j个测试角度的功率谱的功率谱最大值对应的位置,。
33、优选地,步骤6中,所述积累效率比例采用以下方法计算:
34、从所有积累效率中选择大于积累效率阈值的集合,计算在中的比例作为所述积累效率比例。
35、优选地,步骤6中,所述测角误差比例采用以下方法计算:
36、从所有角度估计误差中选择小于误差阈值的集合,计算在中的比例作为所述测角误差比例。
37、优选地,步骤701中,所述匹配性度量函数表示为,则有:
38、
39、式中,表示的加权系数,表示的加权系数。
40、本发明提出一种基于匹配性度量的mimo雷达天线快速校准方法,对于同批次生产的雷达,首先选择其中一部作为标准件,获取标准件的逐角度校准矩阵作为基准校准矩阵,并基于此基准校准矩阵对剩余的非标准件雷达进行快速校准,同时可消除人为安装等因素导致的零度中心偏移。
41、与现有技术方案相比,本发明具有如下有益效果:
42、1、针对传统逐角度校准方法耗时较长的问题,本发明提出的基于匹配性度量的mimo雷达天线快速校准方法可将天线实际相位误差与理论误差结合,基于较少角度上的测试回波即可实现逐角度校准效果,可对同型号雷达进行批量校准。
43、2、本发明提出的快速校准方法可修正校准时人为安装导致的零度中心偏移,进一步提升校准精度,最终提升测角性能。
技术特征:
1.一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤1中,划分零度候选区和测试区的基准为:选择雷达法向零度周围的小角度作为零度候选区,边缘大角度作为测试区。
3.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤3中,所述基准校准矩阵采用以下步骤获得:
4.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤3中,构造候选校准矩阵包括以下步骤:
5.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤4中,所述第j个测试角度的功率谱采用下式计算:
6.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤5中,第j个测试角度的积累效率表示为,则有:
7.如权利要求6所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤5中,第j个测试角度的角度估计误差表示为,则有:
8.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤6中,所述积累效率比例采用以下方法计算:
9.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤6中,所述测角误差比例采用以下方法计算:
10.如权利要求1所述的一种基于匹配性度量的mimo雷达天线快速校准方法,其特征在于,步骤701中,所述匹配性度量函数表示为,则有:
技术总结
本发明公开了一种基于匹配性度量的MIMO雷达天线快速校准方法。本发明提出一种基于匹配性度量的MIMO雷达天线快速校准方法,对于同批次生产的雷达,首先选择其中一部作为标准件,获取标准件的逐角度校准矩阵作为基准校准矩阵,并基于此基准校准矩阵对剩余的非标准件雷达进行快速校准,同时可消除人为安装等因素导致的零度中心偏移。针对传统逐角度校准方法耗时较长的问题,本发明提出的基于匹配性度量的MIMO雷达天线快速校准方法可将天线实际相位误差与理论误差结合,基于较少角度上的测试回波即可实现逐角度校准效果,可对同型号雷达进行批量校准。本发明可修正校准时人为安装导致的零度中心偏移,进一步提升校准精度,最终提升测角性能。
技术研发人员:赵月,周明宇,史颂华,薛旦
受保护的技术使用者:上海几何伙伴智能驾驶有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!