一种带路径规划的磁粉探伤小车的制作方法
本发明涉及一种带路径规划的磁粉探伤小车,具体的,涉及一种带路径规划的磁粉探伤小车。
背景技术:
1、在工业制造领域,对工件进行无损检测是确保产品质量的重要环节。磁粉探伤作为一种常用的无损检测方法,具有操作简便、检测效果好等优点。然而,传统的磁粉探伤过程通常需要人工操作,不仅效率低下,而且受人为因素影响较大,难以保证检测的准确性和一致性。
2、因此,随着自动化技术和智能化设备在各行各业的发展,在磁粉探伤领域,也出现了一些自动化设备,如磁粉探伤机、自动化磁粉探伤装置等。然而,这些设备仍然存在一些问题,如操作复杂、对操作人员技能要求高、无法对复杂形状的工件进行全面检测等。
技术实现思路
1、本发明提出一种带路径规划的磁粉探伤小车,通过预设的路径规划程序,自动对工件进行磁粉探伤;同时,通过搭载高精度传感器和图像处理系统,可以实现探伤过程的实时监控和数据采集,大大提高了检测的准确性和效率。
2、本发明的技术方案如下:
3、一种带路径规划的磁粉探伤小车,包括磁粉检测小车与智能控制设备,磁粉检测小车的检测步骤如下:
4、s100:预先设定的路径规划,储存至智能控制设备;
5、s200:将磁粉检测小车放至检测位置;
6、s300:启动磁粉检测小车,与智能控制设备进行实时远程通讯;
7、s400:智能控制设备导出事先规划的路径,并根据磁粉检测小车当前位置,远程控制磁粉检测小车移动至指定位置;
8、s500:磁粉检测小车在到达检测位置后进行检测,并将采集的数据信息实时发送至智能控制设备、并进行储存;
9、s600:检测完成后,智能控制设备远程控制磁粉检测小车回到起始位置或其它规划位置。
10、进一步的,所述智能控制设备包括操作屏,所述操作屏上的操作区域包括功能控制区、探伤画面显示区、路径设置区及实时路径地图。
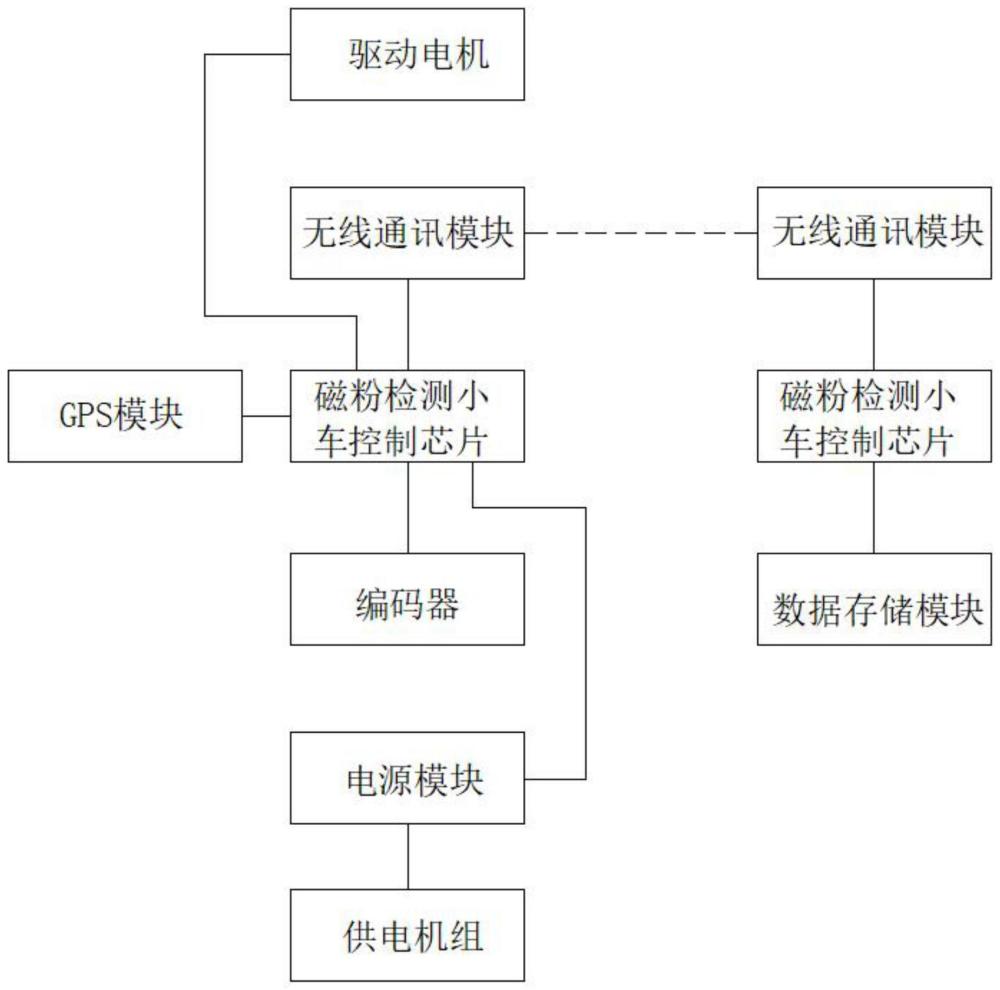
11、进一步的,所述智能控制设备包括数据存储模块与磁粉检测小车无线通讯的无线通讯模块。
12、进一步的,所述磁粉检测小车包括车架、行进轮、转向轮、驱动电机、gps模块以及位于车架内的检测装置。
13、进一步的,步骤s100中的路径规划方法包括:
14、s110:输入被测物体形状及尺寸数据;
15、s120:根据被测物体数据制定检测点位、行进路径、及行进速度;
16、s130:将检测点位与行进路径转换为编码;
17、s140:将各检测点位以起始位置为原点,计算出行进距离。
18、进一步的,步骤s400中,使用电机驱动磁粉检测小车行进,并通过编码器收集行走距离数据,并将行走距离数据传输到智能控制设备的控制主板,控制主板根据预先设定的路径速度和编码器反馈的数据来控制小车的行走距离和方向,并在磁粉检测小车移动至检测位置后,通过磁粉检测小车当前gps坐标,对比检测点位与零位的位置差,复核磁粉检测小车是否准确到达。
19、进一步的,所述磁粉检测小车设有用于反馈的行走距离和方向的编码器。
20、本发明的工作原理及有益效果为:
21、1.带路径规划的磁粉探伤小车可以自动进行路径规划和执行,减少了人工操作和干预的必要性,提高了检测的自动化程度。
22、2.通过预先设定的路径规划,小车可以快速、准确地到达检测位置,避免了人工操作时的延误和误差,提高了检测效率。
23、3.带路径规划的磁粉探伤小车通常采用高精度的传感器和控制系统,可以精确地控制小车的运动轨迹和位置,从而提高了检测的精度和可靠性。
24、4.带路径规划的磁粉探伤小车可以在不同的环境中进行工作,并且可以根据需要进行灵活的路径规划和调整,适应不同的检测需求。
25、5.由于带路径规划的磁粉探伤小车采用预设的路径规划进行检测,因此每次的检测过程和结果都是可重复的,有利于保证检测质量的稳定性和一致性。
26、6.操作人员只需要预先设定好路径规划,剩下的工作都由小车自动完成,大大降低了操作人员的劳动强度。
27、7.由于带路径规划的磁粉探伤小车可以自动进行检测,避免了人工操作时的安全隐患,提高了检测过程的安全性。
28、8.带路径规划的磁粉探伤小车在检测过程中可以记录和存储检测数据,方便后续的数据分析和追溯,有利于保证检测结果的可信度和可追溯性。
技术特征:
1.一种带路径规划的磁粉探伤小车,包括磁粉检测小车与智能控制设备,其特征在于,磁粉检测小车的检测步骤如下:
2.根据权利要求1所述的一种带路径规划的磁粉探伤小车,其特征在于,所述智能控制设备包括操作屏,所述操作屏上的操作区域包括功能控制区、探伤画面显示区、路径设置区及实时路径地图。
3.根据权利要求2所述的一种带路径规划的磁粉探伤小车,其特征在于,所述智能控制设备包括数据存储模块与磁粉检测小车无线通讯的无线通讯模块。
4.根据权利要求1或2或3所述的一种带路径规划的磁粉探伤小车,其特征在于,所述磁粉检测小车包括车架(3)、行进轮(1)、转向轮(2)、驱动电机、gps模块以及位于车架(3)内的检测装置。
5.根据权利要求1或2或3或4所述的一种带路径规划的磁粉探伤小车,其特征在于,步骤s100中的路径规划方法包括:
6.根据权利要求1或2或3或4所述的一种带路径规划的磁粉探伤小车,其特征在于,步骤s400中,使用电机驱动磁粉检测小车行进,并通过编码器收集行走距离数据,并将行走距离数据传输到智能控制设备的控制主板,控制主板根据预先设定的路径速度和编码器反馈的数据来控制小车的行走距离和方向,并在磁粉检测小车移动至检测位置后,通过磁粉检测小车当前gps坐标,对比检测点位与零位的位置差,复核磁粉检测小车是否准确到达。
7.根据权利要求4所述的一种带路径规划的磁粉探伤小车,其特征在于,所述磁粉检测小车设有用于反馈的行走距离和方向的编码器。
技术总结
本发明涉及一种带路径规划的磁粉探伤小车技术领域,提出了一种带路径规划的磁粉探伤小车。通过预设的路径规划程序,自动对工件进行磁粉探伤;同时,通过搭载高精度传感器和图像处理系统,可以实现探伤过程的实时监控和数据采集,大大提高了检测的准确性和效率。
技术研发人员:侯兴隆,张炳奇,孙旭,张松岳,赵婧琦,刘欣,刘群,谢军军,汪占彬
受保护的技术使用者:大唐东北电力试验研究院有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!