高精度地图道路内双黄车道线生成方法和系统与流程
本发明涉及高精地图,尤其涉及一种高精度地图道路内双黄车道线生成方法和系统。
背景技术:
1、高精地图作为自动驾驶系统的基础设施,其精度和准确度对自动驾驶系统至关重要。双线一般来说没有办法被感知算法单独识别并且与单线区分,而且拟合和时候也较容易出问题,本质就是一组数据拟合两个模型,导致目前道路内的双线在自动化阶段先拟合单线然后人工补齐为主,这是高精度地图制图中的重难点。
2、在高精地图制作流程中,虽然一开始点云就已经划分了各种不同类型的车道线,比如白实线,黄虚线等等,但因为一开始精度还不是太高而且有补齐的要求所以我们粗略的将所有线性的点云划分为马路牙子和车道线两种。双线本来就是最难拟合的一种类型,首先是视觉算法目前不支持识别双线,而且双线本质就是一组数据拟合两个模型,最后双线容易缺失点云以及和单线相连,在上下游算法还得单独适配。
技术实现思路
1、本发明为解决上述技术问题,提供了一种高精度地图道路内双黄车道线生成方法和系统,能够全自动生成道路内的双黄线。
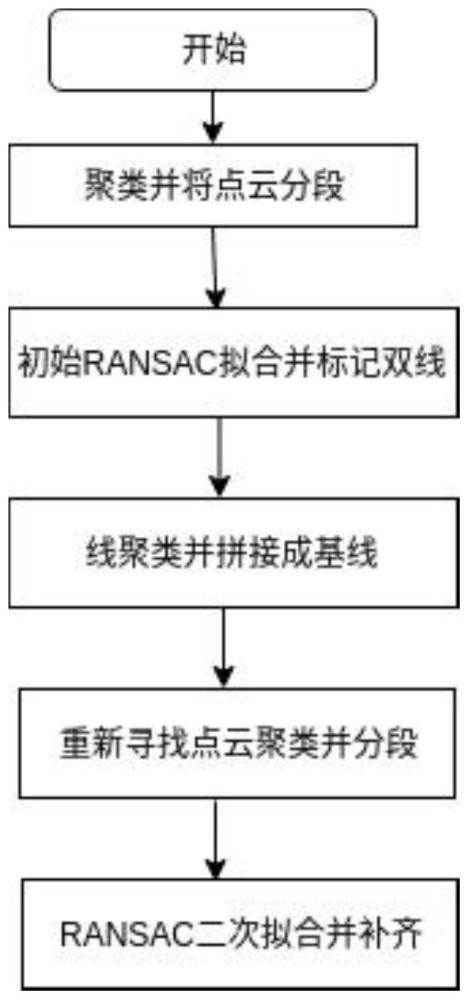
2、为达到上述目的,本发明的技术方案提供了一种高精度地图道路内双黄车道线生成方法,其包括如下步骤:s1:将所有的点云生成聚类,并将聚类根据基准线每隔一定的距离进行分段;s2:利用随机采样一致性ransac算法进行初始拟合,筛选出属于双线的点云并进行标记;s3:将含有潜在双线成分的线段聚类,并拼接成基准线;
3、s4:重新寻找点云聚类并进行分段;s5:利用ransac算法对分段二次拟合出双线,并对空缺部分利用基准线进行补齐。
4、进一步地,步骤s2包括:s21:在进行初始拟合时,通过设定阈值,并将最优解的内点率与阈值进行比较,来筛选出可能是双线的点云。
5、进一步地,步骤s2还包括:s22:对在初始拟合过程中产生的次优解,筛选出方向偏差小于一定阈值并且内点率大于一定阈值的部分次优解;s23:计算这些筛选出的次优解与基准线的中垂线的交点并按照高低进行排列,最高点和最低点的距离代表宽度;s24:排序完的相邻的两个次优解若是在基准线中垂线上的交点距离大于一定的阈值,则认为点云在此处明显分层,然后将排完序的次优解此分成上下两个部分,然后分别从上下两个部分的次优解里面找出内点率最高的来代表上下两块点云分布的中心;其中,判断符合双线拟合的标准是宽度大于一定阈值,并且存在明显分层;当宽度大于一定阈值,但是不存在明显分层时,则按照粗实线用最小二乘法来进行拟合。
6、进一步地,在步骤s22中,在筛选部分次优解时,首先计算次优解和最优解的夹角,将夹角大于一定阈值的过滤掉,并且将剩下的次优解的内点率除以最优解的内点率,如果小于一定阈值则过滤掉。
7、进一步地,在步骤s2中,在筛选出双线的点云并标记后,仍然只拟合单线,或者在已经拟合出双线的情况下,双线的首尾各取中点拟合出一条单线来,然后将上下游的单线关联融合在一起,拟合出一条更长的单线以作为后续二次拟合的基准线。
8、进一步地,在步骤s3中,先将含有双线成分高于一定比例的车道线定义为潜在的双线,然后将这些含有相同特征的线段聚类。
9、进一步地,在步骤s3中,聚类的依据是在一条线每两个相邻的点组成的线串做一定长度的中垂线,若有夹角小于一定阈值的相交就统计这样连续相交的部分的长度,若长度大于一定阈值就认为是两条线部分平行并加入聚类,同时将加入聚类的线串附近的点云聚类聚合到一起作为待拟合的数据;并且在线聚类中选取最长的一条作为基准线,然后将其他线截取之后嫁接上去以延长基准线。
10、进一步地,在步骤s5中,保留方向偏差小于一定阈值且内点率大于一定阈值的次优解,将基准线平移到点云中心之后排除掉上下一定距离内的次优解然后选取一上一下两个局部最优解作为最后的双线;最后将分段后的上线和下线分别进行合并补齐得到完整的双黄线。
11、进一步地,在步骤s5中,对于经过强制拟合双线之后仍然只产生单线的部分,上下判断找到最近的线段,分别判断归类于上线和归类于下线哪个偏差最小,从而进行归类。
12、本发明的技术方案还提供了一种高精度地图道路内双黄车道线生成系统,其包括如下模块:聚类和分段模块,用于将所有的点云生成聚类,并将聚类根据基准线每隔一定的距离进行分段;初始ransac拟合模块,用于利用随机采样一致性ransac算法进行初始拟合,筛选出属于双线的点云并进行标记;基准线拼接模块,用于将含有潜在双线成分的线段聚类,并拼接成基准线;重新聚类和分段模块,用于重新寻找点云聚类并进行分段;二次ransac拟合模块,用于利用ransac算法对分段二次拟合出双线,并对空缺部分利用基准线进行补齐。
技术特征:
1.一种高精度地图道路内双黄车道线生成方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的方法,其特征在于,步骤s2包括:
3.根据权利要求2所述的方法,其特征在于,步骤s2进一步包括:
4.根据权利要求3所述的方法,其特征在于,在步骤s22中,在筛选部分次优解时,首先计算次优解和最优解的夹角,将夹角大于一定阈值的过滤掉,并且将剩下的次优解的内点率除以最优解的内点率,如果小于一定阈值则过滤掉。
5.根据权利要求4所述的方法,其特征在于,在步骤s2中,在筛选出双线的点云并标记后,仍然只拟合单线,或者在已经拟合出双线的情况下,双线的首尾各取中点拟合出一条单线来,然后将上下游的单线关联融合在一起,拟合出一条更长的单线以作为后续二次拟合的基准线。
6.根据权利要求5所述的方法,其特征在于,在步骤s3中,先将含有双线成分高于一定比例的车道线定义为潜在的双线,然后将这些含有相同特征的线段聚类。
7.根据权利要求6所述的方法,其特征在于,在步骤s3中,聚类的依据是在一条线每两个相邻的点组成的线串做一定长度的中垂线,若有夹角小于一定阈值的相交就统计这样连续相交的部分的长度,若长度大于一定阈值就认为是两条线部分平行并加入聚类,同时将加入聚类的线串附近的点云聚类聚合到一起作为待拟合的数据;并且
8.根据权利要求7所述的方法,其特征在于,在步骤s5中,保留方向偏差小于一定阈值且内点率大于一定阈值的次优解,将基准线平移到点云中心之后排除掉上下一定距离内的次优解然后选取一上一下两个局部最优解作为最后的双线;最后将分段后的上线和下线分别进行合并补齐得到完整的双黄线。
9.根据权利要求8所述的方法,其特征在于,在步骤s5中,对于经过强制拟合双线之后仍然只产生单线的部分,上下判断找到最近的线段,分别判断归类于上线和归类于下线哪个偏差最小,从而进行归类。
10.一种高精度地图道路内双黄车道线生成系统,其特征在于,包括如下模块:
技术总结
本发明提供一种高精度地图道路内双黄车道线生成方法和系统,该方法包括如下步骤:S1:将所有的点云生成聚类,并将聚类根据基准线每隔一定的距离进行分段;S2:利用随机采样一致性RANSAC算法进行初始拟合,筛选出属于双线的点云并进行标记;S3:将含有潜在双线成分的线段聚类,并拼接成基准线;S4:重新寻找点云聚类并进行分段;S5:利用RANSAC算法对分段二次拟合出双线,并对空缺部分利用基准线进行补齐。本发明能够生成平滑且符合制图要求的道路内双黄线,并且RANSAC与最小二乘结合的方法也能够减少噪声,使得一般的直线更为平滑。
技术研发人员:何弢,吴健,廖文龙,廖野翔
受保护的技术使用者:酷哇科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!