一种拖挂车车头偏转角度的测量方法及系统与流程
本发明公开一种偏转角度的测量方法,特别是一种拖挂车车头偏转角度的测量方法及系统,属于商用车驾驶辅助系统。
背景技术:
1、近些年,随着商用车、工程车辆的高速发展和普及,商用车辆使用的场景越来越复杂,对驾驶安全的需求越来越强烈,各种驾驶辅助系统也就变的越来越多。
2、现有技术中的驾驶辅助系统都需要车身信号及车身数据的准确输入,与乘用车不同的是,商用车中的拖挂车(即在转弯时,车头与车身或车箱存在一定角度的车辆)的车头转向是通过物理机械装置实现,无法从车身电子信号中直接获取车头的转角信息,这样就需要使用多个测量装置相结合对车头的转角信息进行测量,测量过程中难免会存在一些问题,(1)会导致硬件成本高,安装和现场实施不方便;(2)各测量装置之间需要相互配合测量,由各测量数据的同步性和实时性问题,会导致测量数据误差大。
技术实现思路
1、针对上述提到的现有技术中的拖挂车驾驶辅助系统使用多个测量装置相结合对车头的转角信息进行测量的缺点,本发明提供一种拖挂车车头偏转角度的测量方法及系统,使用一个激光测距装置轻易实现车头转身角度的测量,为驾驶辅助系统和自动驾驶对车身姿态的计算等技术提供了有力的数据支撑。
2、本发明解决其技术问题采用的技术方案是:一种拖挂车车头偏转角度的测量方法,该测量方法包括如下过程步骤:
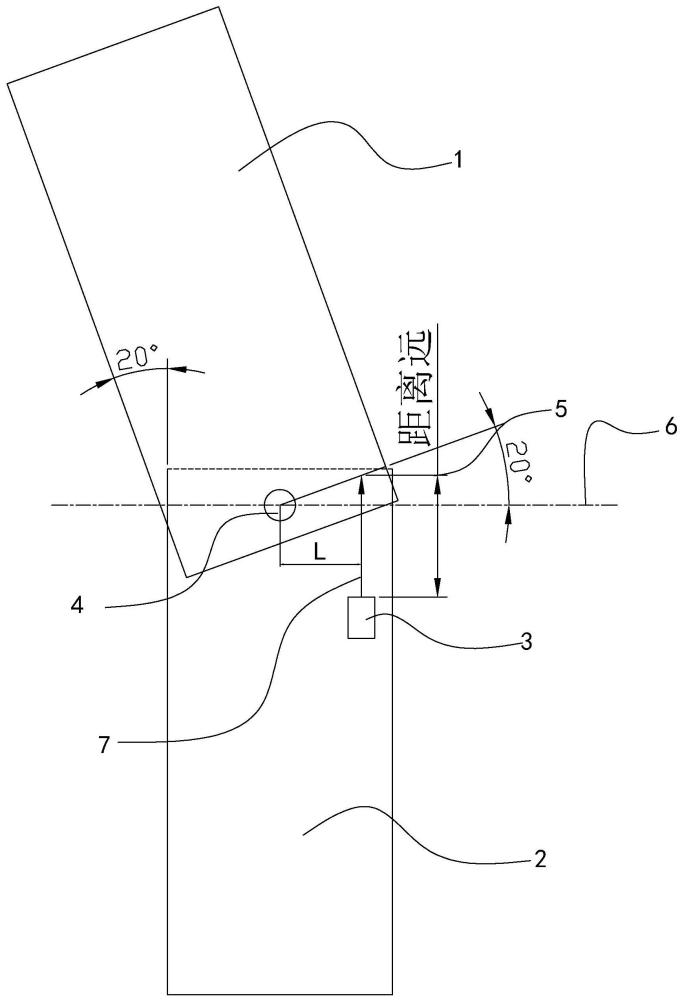
3、步骤s1、安装测距装置:测距装置使用近距离激光测距仪,激光测距仪安装在车箱上或安装在拖挂车底座上;
4、步骤s2、0度位置校准:在汽车方向盘为0度时,触发0度位置校准,记录下当前的激光测距仪测得的距离值 d 0;
5、步骤s3、计算偏转角度:
6、当车头转向远距离一侧时,激光测距仪测量值为d,车头偏转角计算公式如下:
7、
8、当车头转向近距离一侧时,激光测距仪测量值为d,车头偏转角计算公式如下:
9、
10、步骤s4、防抖处理:步骤s3中计算出偏转角后,进行平滑滤波处理,对测量值的轻微抖动进行防抖处理。
11、一种拖挂车车头偏转角度的测量系统,该系统包括:
12、测距装置安装单元:用于安装测距装置,测距装置使用近距离激光测距仪,激光测距仪安装在车箱上或安装在拖挂车底座上;
13、0度位置校准单元:用于在汽车方向盘为0度时,触发0度位置校准,记录下当前的激光测距仪测得的距离值 d 0;
14、偏转角度计算单元:用于计算偏转角度
15、当车头转向远距离一侧时,激光测距仪测量值为d,车头偏转角计算公式如下:
16、
17、当车头转向近距离一侧时,激光测距仪测量值为d,车头偏转角计算公式如下:
18、
19、防抖处理单元:用于计算出偏转角后,进行平滑滤波处理,对测量值的轻微抖动进行防抖处理。
20、本发明解决其技术问题采用的技术方案进一步还包括:
21、所述的激光测距仪安装在车箱或底座上的偏左边或偏右边,激光测距仪垂直正对车头后部设置。
22、所述的车头后部安装有测距档板,测距档板对应于激光测距仪设置。
23、所述的防抖处理采用卡尔曼滤波算法。
24、所述的步骤s1和步骤s2在第一次安装时实施一次,后续正常使用过程中的测量重复步骤s3和步骤s4。
25、所述的激光测距仪安装在车箱或底座上的偏左边或偏右边,激光测距仪垂直正对车头后部设置。
26、所述的车头后部安装有测距档板,测距档板对应于激光测距仪设置。
27、所述的防抖处理采用卡尔曼滤波算法。
28、所述的测距装置安装单元和0度位置校准单元在第一次安装时使用,后续正常使用过程中的测量重复使用偏转角度计算单元和防抖处理单元。
29、本发明的有益效果是:本发明使用单一的硬件装置进行距离测量,然后通过简单的计算,即可完成拖挂车偏转角度的测量和计算,安装简单,硬件成本低,测量计算简单稳定,为驾驶辅助系统和自动驾驶等相关技术提供了准确的数据输入。本发明采用单一测量装置,易于安装、成本低;通过近距离红外激光测量,误差小、稳定性高、易于校准且计算简单。
30、下面将结合附图和具体实施方式对本发明做进一步说明。
技术特征:
1.一种拖挂车车头偏转角度的测量方法,其特征是:所述的测量方法包括如下过程步骤:
2.根据权利要求1所述的拖挂车车头偏转角度的测量方法,其特征是:所述的激光测距仪(3)安装在车箱(2)或底座上的偏左边或偏右边,激光测距仪(3)垂直正对车头(1)后部设置。
3.根据权利要求1所述的拖挂车车头偏转角度的测量方法,其特征是:所述的车头(1)后部安装有测距档板(5),测距档板(5)对应于激光测距仪(3)设置。
4.根据权利要求1所述的拖挂车车头偏转角度的测量方法,其特征是:所述的防抖处理采用卡尔曼滤波算法。
5.根据权利要求1所述的拖挂车车头偏转角度的测量方法,其特征是:所述的步骤s1和步骤s2在第一次安装时实施一次,后续正常使用过程中的测量重复步骤s3和步骤s4。
6.一种拖挂车车头偏转角度的测量系统,其特征是:所述的系统包括:
7.根据权利要求6所述的拖挂车车头偏转角度的测量系统,其特征是:所述的激光测距仪(3)安装在车箱(2)或底座上的偏左边或偏右边,激光测距仪(3)垂直正对车头(1)后部设置。
8.根据权利要求6所述的拖挂车车头偏转角度的测量系统,其特征是:所述的车头(1)后部安装有测距档板(5),测距档板(5)对应于激光测距仪(3)设置。
9.根据权利要求6所述的拖挂车车头偏转角度的测量系统,其特征是:所述的防抖处理采用卡尔曼滤波算法。
10.根据权利要求6所述的拖挂车车头偏转角度的测量系统,其特征是:所述的测距装置安装单元和0度位置校准单元在第一次安装时使用,后续正常使用过程中的测量重复使用偏转角度计算单元和防抖处理单元。
技术总结
本发明公开一种拖挂车车头偏转角度的测量方法及系统,1、测距装置使用近距离激光测距仪,激光测距仪安装在车箱上或安装在拖挂车底座上;2、在汽车方向盘为0度时,触发0度位置校准,记录下当前的激光测距仪测得的距离值d<subgt;0</subgt;;3、计算偏转角度:当车头转向远距离一侧时,激光测距仪测量值为d,车头偏转角计算公式如下:;当车头转向近距离一侧时,激光测距仪测量值为d,车头偏转角计算公式如下:;4、步骤3中计算出偏转角后,进行平滑滤波处理,对测量值的轻微抖动进行防抖处理。
技术研发人员:唐忠林,单能文
受保护的技术使用者:深圳市天双科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!