一种基于磁柱的仿生柔性力传感器
本发明涉及磁体、磁性材料的选择,尤其涉及一种基于磁柱的仿生柔性力传感器。
背景技术:
1、近年来,随着柔性电子产品的发展,柔性力传感器在运动监测、人机交互、个性化医疗和柔性智能机器人方面展现出巨大的潜力。其中,对多方向机械刺激的感知和检测是压力传感器的关键,它可以提供更全面和准确的压力分布和交互信息,从而实现运动方向检测、滑移检测、抓取检测等。为了实现压力传感器的宽量程和多方向力感知,已有研究团队针对不同机制的传感器进行了大量的研究,其中包括压阻式、压电式、电容式、电磁式及摩擦式压力传感器。通过选择可靠的材料、定制的传感器结构及先进的制备工艺,可使传感器向宽量程感知范围及小型化方向发展;同时采用阵列结构作为感知单元可实现多维力检测。这不可避免的涉及到多个电极复杂布线及信号串扰等问题。压电、电磁和摩擦电传感器作为自供电的主动传感器成为研究热点,它们不需要外部电源,大大减小了空间体积。其中电磁式柔性力传感器由于稳定性良好、不易受环境影响且磁场本身具有方向性等优点受到了越来越多人的关注。现有的电磁式柔性传感器是将磁颗粒掺杂到柔性基底中,为传感器提供有效磁场,然而,受限的磁微粒数量及磁化强度再加上部分机械能被弹性衬底吸收,会导致线圈内的磁场强度减小,使得传感器输出性能降低及工作频带变窄。
技术实现思路
1、为克服现有的电磁式柔性传感器由于受限的磁微粒数量及磁化强度再加上部分机械能被弹性衬底吸收,会导致线圈内的磁场强度减小,使得传感器输出性能降低及工作频带变窄的技术缺陷,本发明提供了一种基于磁柱的仿生柔性力传感器。
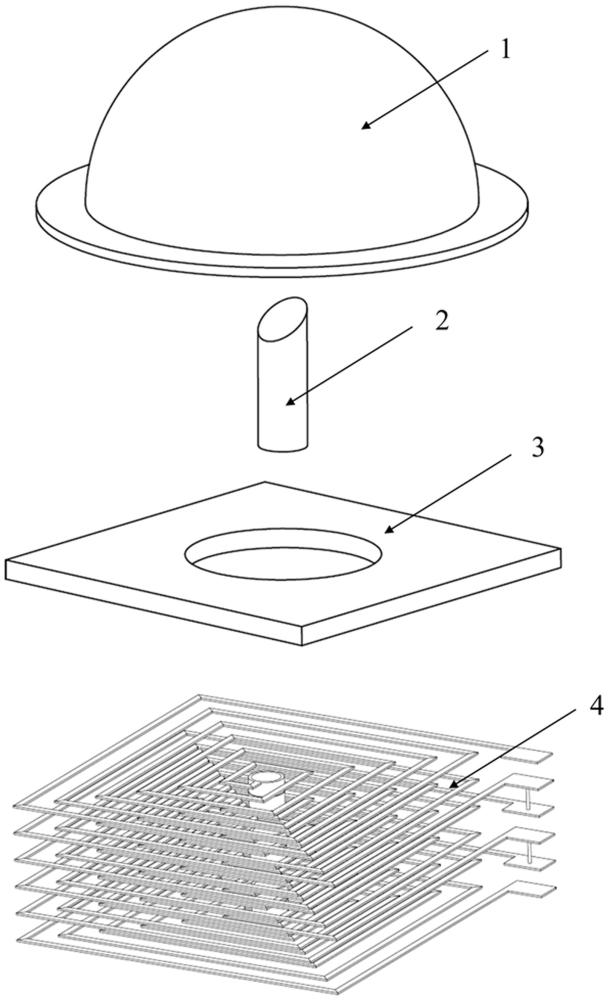
2、本发明提供了一种基于磁柱的仿生柔性力传感器,包括柔性顶部罩层、柔性支撑层、磁体组件和至少一组相导通的堆叠线圈,柔性顶部罩层罩设在柔性支撑层上表面且与柔性支撑层固定连接,二者之间形成空腔结构;磁体组件位于空腔结构的中间区域且与柔性顶部罩层的顶部固定连接,磁体组件包括至少一根位于竖直方向的磁柱;柔性支撑层的中间开有通孔,当磁体组件在柔性顶部罩层的带动下向下运动时通孔用于避让磁体组件;堆叠线圈相堆叠后粘接至柔性支撑层的下表面。
3、柔性顶部罩层作为压力施加层,可带动其内连接的磁体组件运动,具有保护传感器整体结构以及使传感器受力均匀等的作用。柔性支撑层上的通孔为磁体组件运动提供有效活动空间,大幅度增加磁场强度的变化,拓宽了柔性力传感器的检测范围,柔性支撑层上通孔的厚度尺寸决定了整个器件的量程范围。通过调节磁体组件中磁柱数量以及排列方式可调控柔性传感器的磁场方向,使柔性力传感器具备单维或者多维方向的力感知能力,因此适用于多种应用场合下的多维力检测。堆叠线圈作为传感器感知层,当磁体感受到外力运动时,通过法拉第电磁感应将压力信号转化为电信号。本发明通过至少一组堆叠线圈感应磁场的变化。磁场变化会导致线圈中产生感应电动势,进而可完成柔性传感器中力-磁-电耦合的转化,当堆叠线圈设置为多组时,实际上是采用多层堆叠的方式增加线圈的匝数,将线圈匝数成倍增加后,能保证传感器在小体积下实现高电压输出,大大提高了传感器的灵敏度。
4、优选的,磁体组件中磁柱的数量为一根,且磁柱为轴向充磁或径向充磁的硬质永磁体。硬质永磁体的磁场强度大,不容易退磁,且受环境干扰小,稳定性好,可保证柔性力传感器的输出性能。当磁柱为轴向充磁的硬质永磁体时,柔性力传感器可检测竖直方向的力,当磁柱为径向充磁的硬质永磁体,柔性力传感器可检测水平不同方向的力。
5、优选的,磁体组件中包括三根磁柱和一根位于竖直方向的无磁柱,磁柱为径向充磁的硬质永磁体,柔性顶部罩层为半球形壳体结构,三根磁柱和一根无磁柱沿虚拟圆的圆周均匀分布,虚拟圆位于水平面上,且虚拟圆的圆心与柔性顶部罩层的球心位于同一竖直线上,其中相对的两根磁柱的磁极分布方向一致,另外一根磁柱的磁极分界面与其余两根磁柱的磁极分界面垂直。这样设置,使传感器可以感知水平面上的x轴正负方向以及y轴正负方向,x轴和y轴垂直,实现了多维传感能力。
6、更优选的,堆叠线圈的组数为三组,每一组堆叠线圈包括两层上下设置的线圈,其中同一组两层线圈的中间端头通过正负电极相连接,相邻组堆叠线圈之间相邻的线圈通过外端头相连导通;顶层线圈和底层线圈的外端头作为传感器的两根引线。三组堆叠线圈堆叠后,线圈的匝数成倍增加,进一步保证了传感器小体积下高电压输出,大大提高了传感器的灵敏度。
7、优选的,三根磁柱和一根无磁柱的顶部均与柔性顶部罩层的内表面适配,且与柔性顶部罩层的内表面贴合后固定连接。这样设置结构合理,结构连接牢固。
8、优选的,硬质永磁体为钕铁硼永磁体。
9、优选的,柔性顶部罩层和柔性支撑层均由聚二甲基硅氧烷基体制成。聚二甲基硅氧烷基体的杨氏模量较低,由聚二甲基硅氧烷基体制成的柔性顶部罩层能够有效支撑整个传感器器件,聚二甲基硅氧烷基体采用道康宁公司生产的sylgard 184型pdms材料制成,sylgard 184型pdms材料由主剂和固化剂组成,柔性顶部罩层和柔性支撑层与磁体组件共同组成传感器的活动部件。柔性顶部罩层可以为不同的形状,不限于本发明所述的半球形壳体结构,还可以是柱形壳体或其他不规则结构。
10、优选的,堆叠线圈为聚酰亚胺基的柔性铜线圈。多层堆叠线圈采用双层柔性电路板技术制备于聚酰亚胺薄膜上,经过高温导电胶带连接多层,数量可根据需求增删。
11、本发明提供的技术方案与现有技术相比具有如下有益效果:本发明以人体手指中骨骼嵌入肌肉组织为灵感,制备了一种磁场可调控的高灵敏宽频多维力传感器,通过调节磁柱数量以及排列能改变磁场布置,使传感器具备区分激励方向的性能,嵌入软顶层的硬质磁微柱和多层堆叠线圈模拟人类手指的内部骨骼和周围的肌肉组织,柔软的顶层和支撑层将力传递给刚性的磁体,使磁体运动,感知层由多层线圈组成,通过法拉第电磁感应将外界压力转化为电信号;本发明传感器输出性能好,灵敏度高,工作范围宽,具有可调节多维力检测能力,磁场强度高,不易被周围环境影响。
技术特征:
1.一种基于磁柱的仿生柔性力传感器,其特征在于,包括柔性顶部罩层(1)、柔性支撑层(3)、磁体组件和至少一组相导通的堆叠线圈(4),柔性顶部罩层(1)罩设在柔性支撑层(3)上表面且与柔性支撑层(3)固定连接,二者之间形成空腔结构;磁体组件位于空腔结构的中间区域且与柔性顶部罩层(1)的顶部固定连接,磁体组件包括至少一根位于竖直方向的磁柱(2);柔性支撑层(3)的中间开有通孔,当磁体组件在柔性顶部罩层(1)的带动下向下运动时通孔用于避让磁体组件;堆叠线圈(4)相堆叠后粘接至柔性支撑层(3)的下表面。
2.根据权利要求1所述的一种基于磁柱的仿生柔性力传感器,其特征在于,磁体组件中磁柱(2)的数量为一根,且磁柱(2)为轴向充磁或径向充磁的硬质永磁体。
3.根据权利要求1所述的一种基于磁柱的仿生柔性力传感器,其特征在于,磁体组件中包括三根磁柱(2)和一根位于竖直方向的无磁柱(5),磁柱(2)为径向充磁的硬质永磁体,柔性顶部罩层(1)为半球形壳体结构,三根磁柱(2)和一根无磁柱(5)沿虚拟圆的圆周均匀分布,虚拟圆位于水平面上,且虚拟圆的圆心与柔性顶部罩层(1)的球心位于同一竖直线上,其中相对的两根磁柱(2)的磁极分布方向一致,另外一根磁柱(2)的磁极分界面与其余两根磁柱(2)的磁极分界面垂直。
4.根据权利要求3所述的一种基于磁柱的仿生柔性力传感器,其特征在于,堆叠线圈(4)的组数为三组,每一组堆叠线圈(4)包括两层上下设置的线圈,其中同一组两层线圈的中间端头通过正负电极相连接,相邻组堆叠线圈(4)之间相邻的线圈通过外端头相连导通;顶层线圈和底层线圈的外端头作为传感器的两根引线。
5.根据权利要求4所述的一种基于磁柱的仿生柔性力传感器,其特征在于,三根磁柱(2)和一根无磁柱(5)的顶部均与柔性顶部罩层(1)的内表面适配,且与柔性顶部罩层(1)的内表面贴合后固定连接。
6.根据权利要求2至5任一项所述的一种基于磁柱的仿生柔性力传感器,其特征在于,硬质永磁体为钕铁硼永磁体。
7.根据权利要求6所述的一种基于磁柱的仿生柔性力传感器,其特征在于,柔性顶部罩层(1)和柔性支撑层(3)均由聚二甲基硅氧烷基体制成。
8.根据权利要求7所述的一种基于磁柱的仿生柔性力传感器,其特征在于,堆叠线圈(4)为聚酰亚胺基的柔性铜线圈。
技术总结
本发明涉及磁体、磁性材料的选择技术领域,尤其涉及一种基于磁柱的仿生柔性力传感器,解决现有电磁式柔性传感器由于受限的磁微粒数量及磁化强度再加上部分机械能被弹性衬底吸收,导致线圈内的磁场强度减小的技术缺陷;其包括柔性顶部罩层、柔性支撑层、磁体组件和至少一组相导通的堆叠线圈,柔性顶部罩层罩设在柔性支撑层上表面且与柔性支撑层固定连接,二者之间形成空腔结构;磁体组件位于空腔结构的中间区域且与柔性顶部罩层的顶部固定连接,磁体组件包括至少一根位于竖直方向的磁柱;柔性支撑层的中间开有通孔,当磁体组件在柔性顶部罩层的带动下向下运动时通孔用于避让磁体组件;堆叠线圈相堆叠后粘接至柔性支撑层的下表面。
技术研发人员:赵慧鹏,侯晓娟,张婕,何剑,毕小雪,耿文平,穆继亮,余俊斌,丑修建
受保护的技术使用者:中北大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!