一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统
本发明涉及导航定位系统领域,尤其涉及一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统。
背景技术:
1、导航定位是空间感知技术的基本功能,通常依赖于不同类型的传感器、算法和技术,包括全球导航卫星系统(gnss)、惯性导航、视觉导航和融合导航等,主要应用于无人驾驶、机器人导航、航空和室内定位等领域。
2、传感器融合是一种将不同类型传感器的数据相结合的技术,近年来传感器融合的方法受到越来越多的关注,由于异构传感器所提供的互补性,传感器融合算法可以显著提高状态估计系统的精度和鲁棒性。一方面:视觉惯性导航(visual-inertial navigation,简称vins)结合了视觉传感器和imu的信息,imu可以实时提供信息,不受外界环境干扰,因此在某些情况下,如室内导航或gps信号不可用时,imu可用于维持导航的连续性。视觉导航(visual navigation)使用视觉传感器捕捉周围环境的图像,并利用这些图像信息估计物体的位置和姿态。这两种传感器可以互补地提供关于物体运动的信息。视觉传感器通过捕捉周围环境的图像来感知位置,而imu测量物体的加速度和角速度。通过复杂的传感器融合算法,vins可以估计物体的运动状态。然而,由于相机和imu都在局部框架中工作,所以存在里程计漂移问题,即位置估计会随时间发生累积误差。另一方面:全球导航卫星系统(global navigation satellite system,简称:gnss)是导航定位领域中的一个重要组成部分。gnss系统,如gps、glonass、galileo和beidou等,通过一组卫星分布在地球轨道上,向接收器提供高精度的位置、速度和时间信息,为定位任务提供了无漂移和全局感知的解决方案,已广泛应用于各种场景。然而,gnss在某些情况下可能受到信号遮挡、多路径效应或信号丢失的影响,从而导致导航不稳定或不准确,从而无法提供光滑和一致的位置估计。
技术实现思路
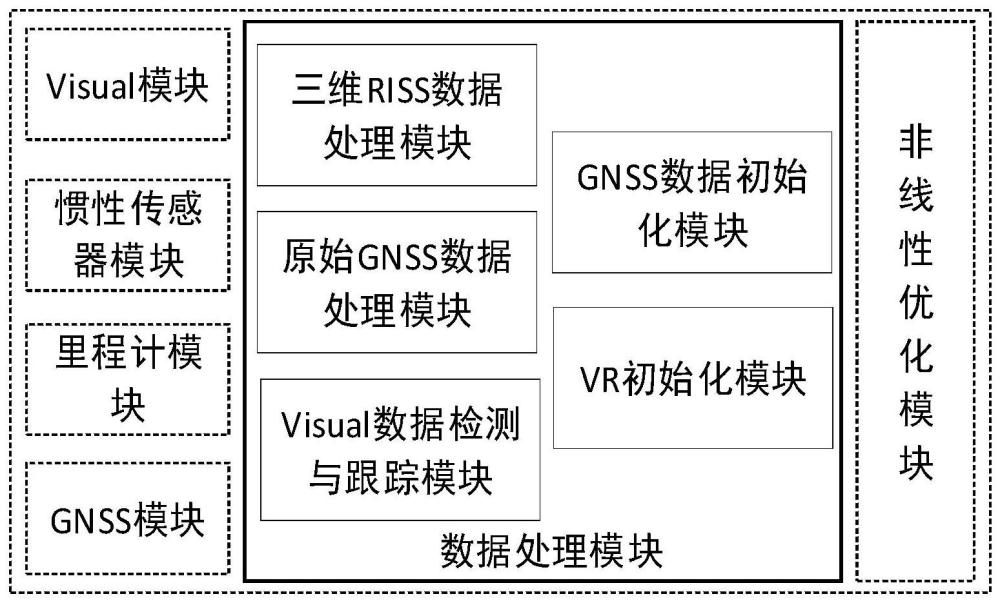
1、根据现有技术存在的问题,本发明公开了一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,具体包括:
2、用于接收相机拍摄到的周围环境图像信息的visual模块;
3、用于接收加速度计和陀螺仪采集到的量测数据的惯性传感器模块;
4、用户获取轮速信息的里程计模块;
5、用于获取gnss原始数据的gnss模块;
6、还包括数据处理模块,所述数据处理模块包括visual数据检测与跟踪模块、三维riss数据处理模块、原始gnss数据处理模块、gnss数据初始化模块和vr初始化模块;
7、所述数据处理模块接收visual模块、惯性传感器模块、里程计模块和gnss模块传送的数据信息,所述visual数据检测与跟踪模块从周围环境图像序列中检测和跟踪稀疏特征点,并将获取的特征信息传送至vr初始化模块,所述三维riss数据处理模块接收里程计模块、加速度计和陀螺仪传送的量测数据并解算出导航状态和轨迹,将解算后的导航状态传送至vr初始化模块,所述原始gnss数据处理模块对gnss原始数据进行预处理,过滤掉低海拔和不稳定的卫星信号,并将预处理后的数据传输至gnss数据初始化模块,所述vr初始化模块接收visual数据检测与跟踪模块以及三维riss处理模块传送的数据信息,将三维riss处理模块解算的导航轨迹与visual数据检测与跟踪模块处理后的特征信息对齐,所述gnss数据初始化模块在vr初始化对齐后,进行从粗到精的gnss初始化过程,并对gnss退化情况进行检查和处理;
8、所述非线性优化模块对该系统状态进行联合估计。
9、所述三维riss数据处理模块对接收到的俯仰角,横滚角和航向角进行解算、将获取的位置信息、速度信息传送至vr初始化模块。
10、所述vr初始化模块接收visual数据检测与跟踪模块和三维riss数据处理模块传送的数据信息,利用sfm算法进行单目视觉估计滑窗内所有帧的位姿,再通过视觉与riss预积分结果融合对齐方法进行视觉惯性联合校准。
11、所述sfm算法为利用图像之间的特征信息从视觉到运动的角度推断,获得场景中各个点的三维位置信息。
12、由于采用了上述技术方案,本发明提供的一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,该系统将视觉数据、惯性数据和里程计数据与多星座gnss原始测量数据紧耦合在一起,基于在线的粗到精初始化方法,用于初始化全球导航卫星系统(gnss)和视觉惯性状态,因此该系统具备实时估计能力,且适用于各种复杂环境。
技术特征:
1.一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,其特征在于包括:
2.据权利要求1所述的一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,其特征在于:所述三维riss数据处理模块对接收到的俯仰角,横滚角和航向角进行解算、将获取的位置信息、速度信息传送至vr初始化模块。
3.根据权利要求1所述的一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,其特征在于:所述vr初始化模块接收visual数据检测与跟踪模块和三维riss数据处理模块传送的数据信息,利用sfm算法进行单目视觉估计滑窗内所有帧的位姿,再通过视觉与riss预积分结果融合对齐方法进行视觉惯性联合校准。
4.根据权利要求3所述的一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,其特征在于:所述sfm算法为利用图像之间的特征信息从视觉到运动的角度推断,获得场景中各个点的三维位置信息。
技术总结
本发明公开了一种用于导航状态估计的卫星视觉惯性里程计紧耦合系统,该系统包括Visual模块、惯性传感器模块、里程计模块、GNSS模块、数据处理模块和非线性优化模块;所述数据处理模块包括三维RISS数据处理、原始GNSS数据处理、Visual数据检测与跟踪、GNSS数据初始化和VR初始化。由于现有的视觉惯性导航方法存在惯性器件漂移的问题;该系统将视觉数据,惯性数据和里程计数据与多星座GNSS原始测量数据紧耦合在一起,基于在线的粗到精初始化方法,用于初始化全球导航卫星系统和视觉惯性状态,因此该系统具备实时估计能力,且适用于各种复杂环境。
技术研发人员:王野,杨培泽,刘亭秀,刘洪波,宋浩,马裕博,杜映雪
受保护的技术使用者:大连海事大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!