一种高精度光纤陀螺阈值测量方法与流程
本发明涉及光纤陀螺仪,特别涉及一种高精度光纤陀螺阈值测量方法。
背景技术:
1、光纤陀螺仪是一种基于sagnac效应的角速度测量传感器,一般为无转子的全固态结构,该设备具有稳定性好、测量精度高、使用寿命长、抗干扰能力强等特点,被广泛应用于各类高精度测量领域,现有的高精度光纤陀螺仪阈值检测方案会利用地球自转的余弦分量进行测量,也有方案在地球自转分量的基础上增加了地球章动等误差量实现阈值的检测。专利号cn111829503a和专利公开号cn115638807a的方案都利用了地球自转角速度分量进行设备阈值检测,但是检测的周期都相对较长且需要北向对齐操作,上述方案的操作难度大、操作过程繁琐、适用范围较窄,不利于光纤陀螺阈值的测定,为此,我们提出了一种高精度光纤陀螺阈值测量方法。
技术实现思路
1、为了解决上述问题,本发明提供一种高精度光纤陀螺阈值测量方法。本发明解决了检测的周期都相对较长且需要北向对齐操作,上述方案的操作难度大、操作过程繁琐、适用范围较窄,不利于光纤陀螺阈值的测定的问题。
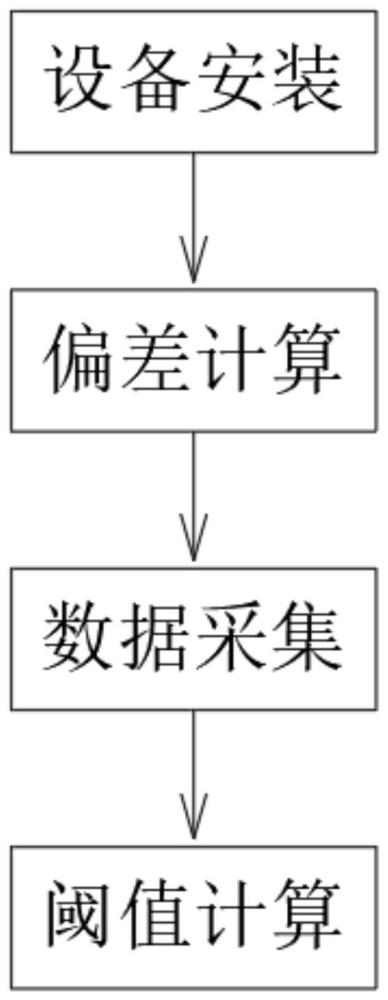
2、本发明中的一种高精度光纤陀螺阈值测量方法,包括;
3、s1、设备安装:
4、将高精度光纤陀螺设备安装到高精度转台平面,保证设备与转台的刚性固链;
5、s2、偏差计算:
6、地球自转角速度的投影分量与光纤陀螺仪各轴的测量输出值可以表示为式(1)的形式:
7、
8、其中,为光纤陀螺仪输出的理论值,ω表示陀螺仪的实际输出值,ωe为地球自转角速度值,l为设备所在地的经度值,k为设备的比例因子,表示陀螺仪轴与正北的夹角,ω为转台当前的转速值。
9、光纤陀螺设备设备初始安装时对应的转台角度为θ0,利用转台将光纤陀螺设备旋转180度后对应的角度为θπ,根据式(2)的计算流程可以获得光纤陀螺的偏差量。
10、
11、s3、数据采集:
12、根据公式(1)和(2)可以把陀螺仪的输出近似为式(3),即固定幅值的余弦形式:
13、
14、s4、阈值计算:
15、将光纤陀螺的输出值与地球自转角速度构建的余弦函数拟合,在φ接近特定角度时会计算出较大偏差量,该偏差点对应的测量值即对应轴的检测阈值。
16、上述方案中,所述高精度转台平面可进行180°旋转。
17、上述方案中,所述高精度转台平面上设有角度传感器。
18、上述方案中,所述s2以及时的操作次数不少于五次。
19、上述方案中,所述陀螺仪轴与正北的夹角范围为0°~45°。
20、本发明的优点和有益效果在于:本发明提供一种高精度光纤陀螺阈值测量方法,数据采集流程只需要按照一个方向旋转转台180度即可。旋转的角度增量大小需要参考光纤陀螺给出的理论测量精度,因为光纤陀螺的轴是保持正交的,所以一次旋转可以验证两个轴的阈值。光纤陀螺阈值检测不需要进行北向对齐操作,检测流程操作简便,数据采集周期短,可以极大的提高光纤陀螺的阈值检测效率,该种测量方法,高精度光纤陀螺不需要进行寻北对齐,安装到转台设备即可,设备安装操作简单,数据采集周期短,仅需要延一个方向旋转即可采集,阈值检测效率高,适用范围广。
技术特征:
1.一种高精度光纤陀螺阈值测量方法,其特征在于,包括;
2.根据权利要求1所述的一种高精度光纤陀螺阈值测量方法,其特征在于,所述高精度转台平面可进行180°旋转。
3.根据权利要求1所述的一种高精度光纤陀螺阈值测量方法,其特征在于,所述高精度转台平面上设有角度传感器。
4.根据权利要求1所述的一种高精度光纤陀螺阈值测量方法,其特征在于,所述s2以及时的操作次数不少于五次。
5.根据权利要求1所述的一种高精度光纤陀螺阈值测量方法,其特征在于,所述陀螺仪轴与正北的夹角范围为0°~45°。
技术总结
本发明公开了一种高精度光纤陀螺阈值测量方法,包括S1、设备安装,将高精度光纤陀螺设备安装到高精度转台平面,保证设备与转台的刚性固链,S2、偏差计算,S3、数据采集以及S4、阈值计算,光纤陀螺的输出值与地球自转角速度构建的余弦函数拟合,在φ接近特定角度时会计算出较大偏差量,该偏差点对应的测量值即对应轴的检测阈值。该种测量方法,高精度光纤陀螺不需要进行寻北对齐,安装到转台设备即可,设备安装操作简单,数据采集周期短,仅需要延一个方向旋转即可采集,阈值检测效率高,适用范围广。
技术研发人员:杭义军,杨帅,吕印新
受保护的技术使用者:原极(上海)科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!