基于数字孪生的车辆行驶路径规划方法、装置以及设备与流程
本发明涉及道路规划,尤其涉及基于数字孪生的车辆行驶路径规划方法、装置以及设备。
背景技术:
1、车辆行驶路径规划是在一定的环境模型基础上,给定无人驾驶汽车起始点和目标点后,按照性能指标规划出一条无碰撞、能安全到达目标点的有效路径。同时需要考虑到交通规则、道路状况、行人等因素,使车辆能够安全、高效地到达目的地。
2、现阶段在车辆行驶路径规划技术领域中,通常采用车辆周围传感器采集周围数据,并通过联网发送至云端后,通过云端服务器进行路径规划,再控制车辆根据路径规划进行驾驶操作,这种方案会导致路径规划精度不够且未有较好的模拟预测策略,从而使车辆产生行驶偏差,行驶安全性较低的问题。
技术实现思路
1、本发明提供一种基于数字孪生的车辆行驶路径规划方法、装置以及设备,可以提高车辆行驶路径规划精度和车辆行驶安全性。
2、为实现上述目的,本发明提供的一种基于数字孪生的车辆行驶路径规划方法,包括:
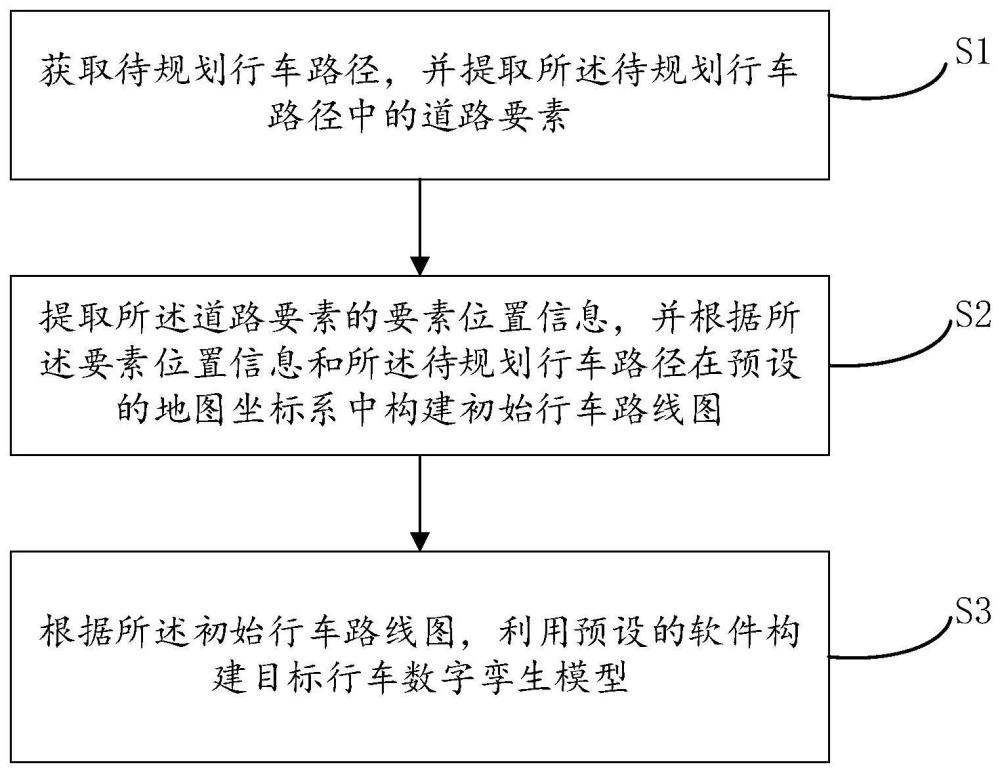
3、获取待规划行车路径,并提取所述待规划行车路径中的道路要素;
4、提取所述道路要素的要素位置信息,并根据所述要素位置信息和所述待规划行车路径在预设的地图坐标系中构建初始行车路线图;
5、根据所述初始行车路线图,利用预设的软件构建目标行车数字孪生模型。
6、可选地,所述提取所述待规划行车路径中的道路要素,包括:
7、提取所述待规划行车路径中的几何图像数据;
8、对所述几何图像数据进行数据标准化处理,得到标准几何图像数据;
9、对所述标准几何图像数据进行图像识别得到图像识别结果;
10、汇总所述图像识别结果得到所述道路要素。
11、可选地,所述对所述几何图像数据进行数据标准化处理,包括:
12、识别所述几何图像数据的分辨率,并根据所述分辨率对所述几何图像数据进行图像分割处理,得到像素点图像数据;
13、对所述像素点图像数据进行灰度处理,得到标准几何图像数据。
14、可选地,所述对所述标准几何图像数据进行图像识别得到图像识别结果,包括:
15、根据预设的图像处理模型的输入格式,将所述标准几何图像数据转化为图像像素矩阵;
16、利用所述预设的图像处理模型的卷积层对所述图像像素矩阵进行卷积处理,得到几何图像数据特征;
17、利用所述预设的图像处理模型的池化层对所述几何图像数据特征进行平均值池化处理,得到池化几何图像数据特征;
18、利用所述预设的图像处理模型的全连接层对池化几何图像数据特征进行扁平化处理,得到几何图像数据特征向量;
19、通过所述预设的图像处理模型中输出层的激活函数对所述几何图像数据特征向量进行特征识别,得到所述图像识别结果。
20、可选地,所述根据所述要素位置信息和所述待规划行车路径在预设的地图坐标系中构建初始行车路线图,包括:
21、将所述待规划行车路径按照预设的目标精度要求在所述预设的地图坐标系中进行映射,得到初始路径图;
22、在所述初始路径图中将所述要素位置信息对应的道路要素进行映射,得到所述初始行车路线图。
23、可选地,所述利用预设的软件构建目标行车数字孪生模型,包括:
24、利用预设的软件打开车辆行驶规划任务;
25、将所述初始行车路线图、预设的待行驶车辆以及所述预设的待行驶车辆的属性信息导入至所述车辆行驶规划任务中,得到初始行车数字孪生模型;
26、将所述的道路要素的运行规则加载至所述初始行车数字孪生模型中,得到目标行车数字孪生模型。
27、可选地,在所述利用预设的软件构建目标行车数字孪生模型之后,还包括:
28、获取预设的待行驶车辆的实时行驶数据,并通过所述实时行驶数据在所述目标行车数字孪生模型中进行模拟运行,并利用模拟运行结果调整所述预设的待行驶车辆的行驶规划。
29、为了解决上述问题,本发明还提供一种基于数字孪生的车辆行驶路径规划装置,所述装置包括:
30、道路要素获取模块,用于获取待规划行车路径,并提取所述待规划行车路径中的道路要素;
31、初始行车路线图构建模块,用于提取所述道路要素的要素位置信息,并根据所述要素位置信息和所述待规划行车路径在预设的地图坐标系中构建初始行车路线图;
32、数字孪生模型构建模块,用于根据所述初始行车路线图,利用预设的软件构建目标行车数字孪生模型。
33、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
34、至少一个处理器;以及,
35、与所述至少一个处理器通信连接的存储器;其中,
36、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述所述的基于数字孪生的车辆行驶路径规划方法。
37、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个计算机程序,所述至少一个计算机程序被电子设备中的处理器执行以实现上述所述的基于数字孪生的车辆行驶路径规划方法。
38、本发明实施例通过获取待规划行车路径,并提取所述待规划行车路径中的道路要素,可以通过道路要素的提取,提高车辆在行车路径上行驶的准确性,另外,根据所述要素位置信息和所述待规划行车路径在预设的地图坐标系中构建初始行车路线图,可以实现真实地图中各道路元素在预设的地图坐标系中的精准映射,提高地图路径规划中的精准度,再者,根据所述初始行车路线图,利用预设的软件构建目标行车数字孪生模型,可以通过目标行车数字孪生模型模拟车辆在实际行驶中的运行状况,并通过模拟后的行驶数据对真实环境下的车辆行驶过程进行调整,可以提高车辆在真实环境中行驶的安全性。
技术特征:
1.一种基于数字孪生的车辆行驶路径规划方法,其特征在于,所述方法包括:
2.如权利要求1所述的基于数字孪生的车辆行驶路径规划方法,其特征在于,所述提取所述待规划行车路径中的道路要素,包括:
3.如权利要求2所述的基于数字孪生的车辆行驶路径规划方法,其特征在于,所述对所述几何图像数据进行数据标准化处理,包括:
4.如权利要求2所述的基于数字孪生的车辆行驶路径规划方法,其特征在于,所述对所述标准几何图像数据进行图像识别得到图像识别结果,包括:
5.如权利要求1所述的基于数字孪生的车辆行驶路径规划方法,其特征在于,所述根据所述要素位置信息和所述待规划行车路径在预设的地图坐标系中构建初始行车路线图,包括:
6.如权利要求1所述的基于数字孪生的车辆行驶路径规划方法,其特征在于,所述利用预设的软件构建目标行车数字孪生模型,包括:
7.如权利要求1所述的基于数字孪生的车辆行驶路径规划方法,其特征在于,在所述利用预设的软件构建目标行车数字孪生模型之后,还包括:
8.一种基于数字孪生的车辆行驶路径规划装置,其特征在于,所述装置可以实现如权利要求1至7中任意一项所述的基于数字孪生的车辆行驶路径规划方法,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任意一项所述的基于数字孪生的车辆行驶路径规划方法。
技术总结
本发明涉及道路规划技术,揭露了基于数字孪生的车辆行驶路径规划方法,包括:获取待规划行车路径,并提取所述待规划行车路径中的道路要素;提取所述道路要素的要素位置信息,并根据所述要素位置信息和所述待规划行车路径在预设的地图坐标系中构建初始行车路线图;根据所述初始行车路线图,利用预设的软件构建目标行车数字孪生模型。本发明还提出一种基于数字孪生的车辆行驶路径规划装置、设备以及介质。本发明可以提高车辆行驶路径规划精度和车辆行驶安全性。
技术研发人员:崔金茂,常雪阳,游绍文
受保护的技术使用者:西部车网(重庆)有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!