一种毫米波雷达探测距离动态调节的方法及毫米波雷达与流程
本发明涉及雷达,具体涉及到一种毫米波雷达探测距离动态调节的方法及毫米波雷达。
背景技术:
1、随着汽车工业的发展,无论是厂家还是消费者开始对汽车行驶安全问题越来越重视。毫米波雷达作为智能安全驾驶领域最重要的传感器,近年受到越来越多的关注,同时对于毫米波雷达的性能也提出了更高的要求,如前向的自适应巡航和紧急自动对毫米波雷达的探测距离和距离分辨率提出更高的要求。
2、毫米波雷达需要通过中频滤波器带宽计算出目标距离参数,中频滤波器带宽通过目标回波信号的上扫频的中频频率和下扫频的中频频率计算得出。但是,如果有多个目标,则会有多个上扫频的中频频率和多个下扫频的中频频率,上扫频的中频频率和下扫频的中频频率无法进行一一对应,多个上扫频的中频频率和多个下扫频的中频频率任意组合,会计算出很多个目标距离,导致目标距离的数量远超过目标数量,大部分目标距离对应的目标是虚假目标,这样会带来非常高的虚假率。因此对于毫米波雷达而言,正确识别多个目标消除虚假目标是设计时需要考虑的问题。
技术实现思路
1、本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种毫米波雷达探测距离动态调节的方法及毫米波雷达。
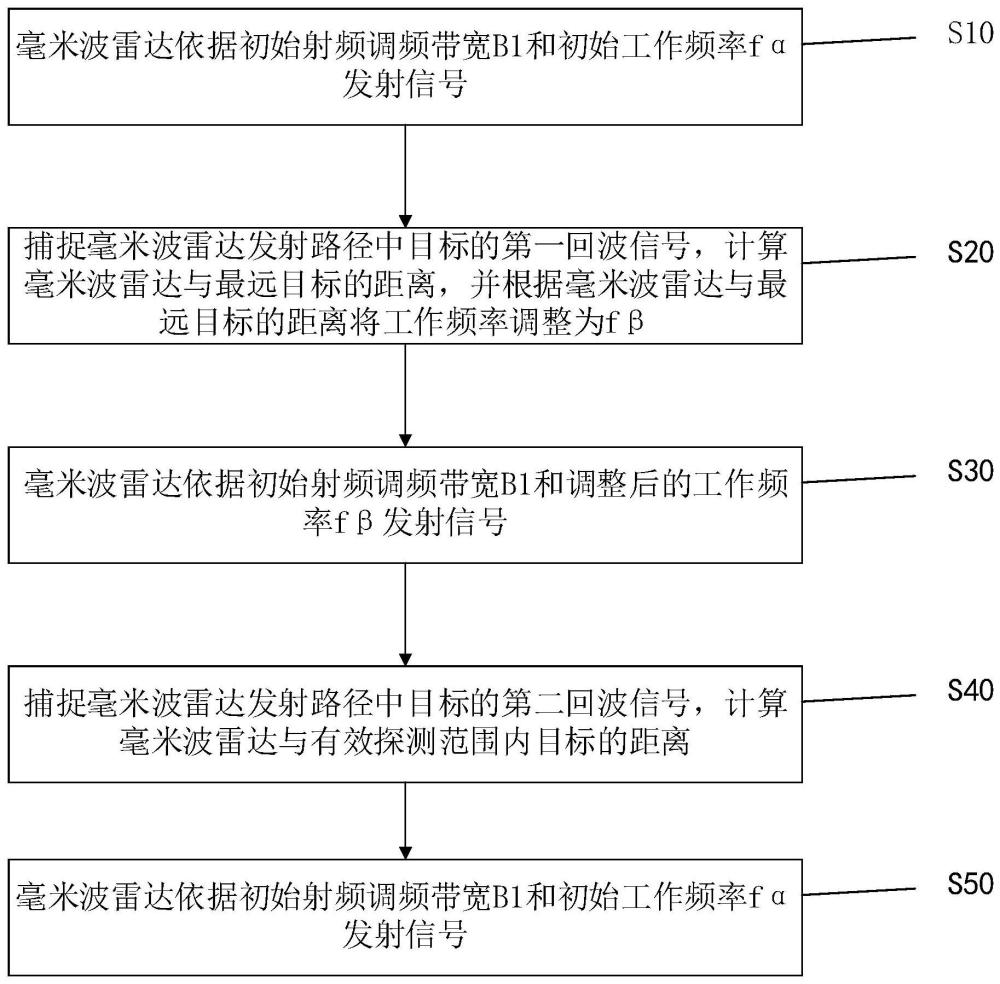
2、为实现上述目的,本发明采用的技术方案如下:一种毫米波雷达探测距离动态调节的方法,包括步骤:
3、s10:毫米波雷达依据初始射频调频带宽b1和初始工作频率fα发射信号;
4、s20:捕捉毫米波雷达发射路径中目标的第一回波信号,计算毫米波雷达与最远目标的距离,并根据毫米波雷达与最远目标的距离将工作频率调整为fβ;
5、s30:毫米波雷达依据初始射频调频带宽b1和调整后的工作频率fβ发射信号;
6、s40:捕捉毫米波雷达发射路径中目标的第二回波信号,计算毫米波雷达与有效探测范围内目标的距离;
7、s50:毫米波雷达依据初始射频调频带宽b1和初始工作频率fα发射信号。
8、进一步的,毫米波雷达最大探测距离计算公式为:
9、
10、pr=10*lg(k*f*tk)+nf+snr,
11、其中,rmax为最大探测距离,pt为发射功率,gt为发射天线增益,gr为接受天线增益,σ为散射截面面积,λ为发射信号中心频率波长,pr为接受灵敏度,k为玻尔曼兹常数,f为发射信号与回波信号的差频,即中频滤波器带宽,tk为开尔文温度,nf为噪声系数,snr为噪声比。
12、进一步的,目标与毫米波雷达的距离计算公式为:
13、
14、其中,r为目标与毫米波雷达的距离,τ是目标回波的延时,c为真空光速,t为扫频周期,f为中频滤波器带宽,b为射频调频带宽;
15、根据目标与毫米波雷达的距离计算公式能够计算出目标与毫米波雷达的四个距离,四个距离分别包括在初始射频调频带宽和初始工作频率条件下计算的第一距离以及在可变工作频率和固定射频调频带宽条件下计算的第二距离、第三距离;
16、通过比对第一距离、第二距离、第三距离来剔除虚假目标。
17、进一步的,在初始射频调频带宽和初始工作频率条件下计算的第一距离为:
18、
19、其中,r1为目标与毫米波雷达的第一距离,τ是目标回波的延时,c为真空光速,t为扫频周期,fa是第一中频滤波器带宽,f1为运动目标的第一回波信号在上扫频的中频频率,fo为运动目标引起的多普勒频率,b1为初始射频调频带宽。
20、进一步的,在可变工作频率和固定射频调频带宽条件下计算的第二距离:
21、
22、其中,r2为目标与毫米波雷达的第二距离,τ是目标回波的延时,c为真空光速,t为扫频周期,fb是第二中频滤波器带宽,f2为运动目标的第一回波信号在下扫频的中频频率,fo为运动目标引起的多普勒频率,b1为初始射频调频带宽,fα为初始工作频率,fβ为调整后的工作频率。
23、进一步的,在可变工作频率和固定射频调频带宽条件下计算的第三距离:
24、
25、其中,r3为目标与毫米波雷达的第三距离,τ是目标回波的延时,c为真空光速,t为扫频周期,fc是第三中频滤波器带宽,f3为运动目标的第二回波信号在下扫频的中频频率,fo为运动目标引起的多普勒频率,b1为初始射频调频带宽,fα为初始工作频率,fβ为调整后的工作频率。
26、进一步的,判断第一距离、第二距离、第三距离之间的误差是否超过5%;
27、当第一距离、第二距离、第三距离之间的误差不超过5%,则认为四个距离所对应的目标为真实目标;
28、当第一距离、第二距离、第三距离之间的误差超过5%,则认为四个距离所对应的目标为虚假目标,剔除虚假目标。
29、本发明还提供了一种毫米波雷达,包括天线模块、处理模块、电源模块、控制电路模块,所述处理模块采用上述的毫米波雷达探测距离动态调节的方法对毫米波雷达的探测距离进行动态调节。
30、由上述对本发明的描述可知,与现有技术相比,本发明至少包括以下有益效果之一:
31、1.本发明通过固定射频调频带宽和可变工作频率的设计,可针对同一目标计算出多种运算下对应的目标距离,通过多种运算验证目标距离是否有效,以剔除无效的目标距离,有效提高了毫米波雷达的工作效率,以正确识别多个目标并消除虚假目标。
32、2.本发明通过单个毫米波雷达实现测距、测速、多目标识别和跟踪等功能,有效的减少了单车需要搭载的毫米雷达数量,降低的毫米波雷达的装车门槛。
33、3.本发明通过可变工作频率的设计,使得毫米波雷达能够将同一个工作周期内的三组测量结果进行比对,提高了毫米波雷达的工作效率,有效地剔除虚假目标。
技术特征:
1.一种毫米波雷达探测距离动态调节的方法,其特征在于,包括步骤:
2.根据权利要求1所述的毫米波雷达探测距离动态调节的方法,其特征在于,毫米波雷达最大探测距离计算公式为:
3.根据权利要求2所述的毫米波雷达探测距离动态调节的方法,其特征在于,目标与毫米波雷达的距离计算公式为:
4.根据权利要求3所述的毫米波雷达探测距离动态调节的方法,其特征在于,在初始射频调频带宽和初始工作频率条件下计算的第一距离为:
5.根据权利要求3所述的毫米波雷达探测距离动态调节的方法,其特征在于,在可变工作频率和固定射频调频带宽条件下计算的第二距离:
6.根据权利要求3所述的毫米波雷达探测距离动态调节的方法,其特征在于,在可变工作频率和固定射频调频带宽条件下计算的第三距离:
7.根据权利要求3所述的毫米波雷达探测距离动态调节的方法,其特征在于,判断第一距离、第二距离、第三距离之间的误差是否超过5%;
8.一种毫米波雷达,包括天线模块、处理模块、电源模块、控制电路模块,其特征在于,所述处理模块采用如权利要求1~7中任一项所述的毫米波雷达探测距离动态调节的方法对毫米波雷达的探测距离进行动态调节。
技术总结
本发明涉及雷达技术领域,具体涉及到一种毫米波雷达探测距离动态调节的方法及毫米波雷达。调节的方法包括步骤:毫米波雷达依据初始射频调频带宽B1和初始工作频率fα发射信号;根据毫米波雷达与最远目标的距离将工作频率调整为fβ;毫米波雷达依据初始射频调频带宽B1和调整后的工作频率fβ发射信号;捕捉毫米波雷达发射路径中目标的第二回波信号,计算毫米波雷达与有效探测范围内目标的距离。本发明通过固定射频调频带宽和可变工作频率的设计,可针对同一目标计算出多种运算下对应的目标距离,通过多种运算验证目标距离是否有效,以剔除无效的目标距离。
技术研发人员:柯文河,唐建山,张巩固,刘翔章
受保护的技术使用者:江西联创电子有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!