路侧毫米波雷达多帧关联滤波方法、设备及可读存储介质与流程
本发明涉及雷达信号处理,尤其涉及一种路侧毫米波雷达多帧关联滤波方法、设备及可读存储介质。
背景技术:
1、毫米波雷达是工作在毫米波波段(millimeter wave)探测的雷达。毫米波雷达具有全天时、全天候检测的优势,且对于移动目标检测具有较高的准确率,运算量也较小。通过雷达获得目标的距离、方位、速度等信息,利用目标聚类、目标关联和跟踪方法,可以实现对机动车、非机动车、行人等目标的监控。目前,毫米波雷达产品在市场的需求旺盛。
2、在毫米波雷达的多目标跟踪算法中通常采用最近邻域法、概率数据关联法、多假设跟踪法、联合概率数据关联法、经验联合概率数据关联算法、网络流模型,条件随机场模型,二部图模型等;其中,基于深度学习的多目标跟踪经典算法deepsort,将数据关联问题转换为带权重的二部图匹配问题,并实现km算法解决航迹与目标的匹配。然而,km(kuhn-munkres,加权的匈牙利匹配算法),复杂度大,还需要进行递归处理。因此,需要研发一种简单可靠的关联滤波方法,以实现多目标跟踪。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种路侧毫米波雷达多帧关联滤波方法、设备及可读存储介质,可引入点云密度集合,解决并排车的问题,结果更为可靠。
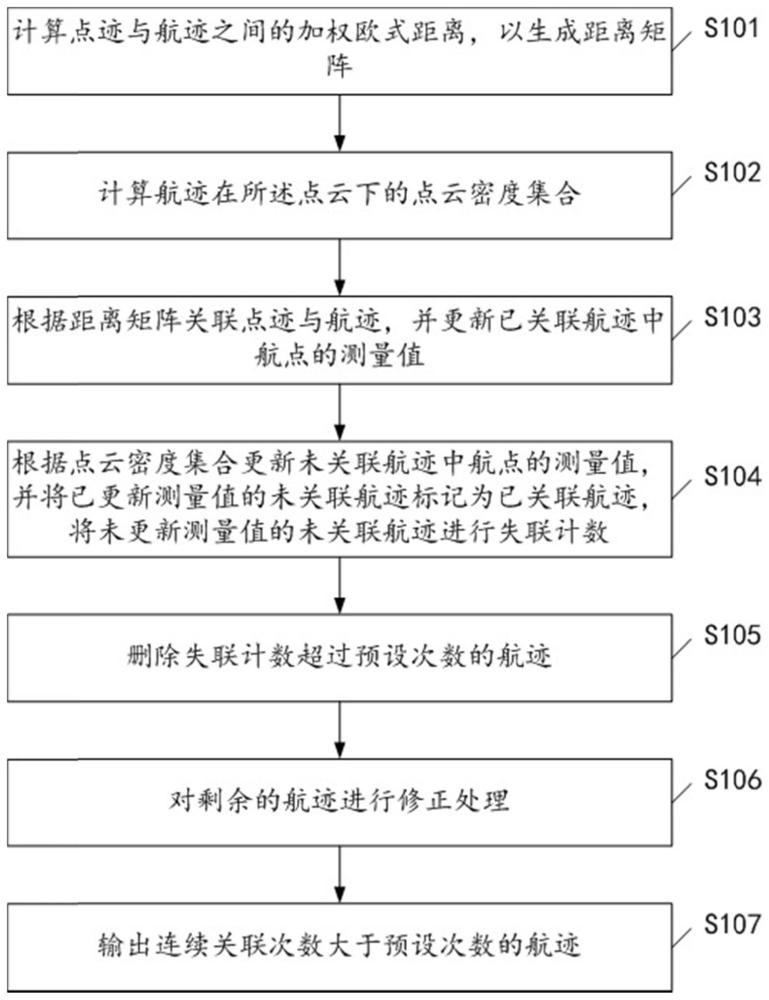
2、为了解决上述技术问题,本发明提供了一种路侧毫米波雷达多帧关联滤波方法,包括:计算点迹与航迹之间的加权欧式距离,以生成距离矩阵;计算所述航迹在点云下的点云密度集合;根据所述距离矩阵关联所述点迹与航迹,并更新已关联航迹中航点的测量值;根据所述点云密度集合更新未关联航迹中航点的测量值,并将已更新测量值的未关联航迹标记为已关联航迹,将未更新测量值的未关联航迹进行失联计数;删除失联计数超过预设次数的航迹;对剩余的航迹进行修正处理;输出连续关联次数大于预设次数的航迹。
3、作为上述方案的改进,所述计算所述点迹与航迹之间的加权欧式距离,以生成距离矩阵的步骤包括:根据公式计算所述点迹与航迹之间的加权欧式距离d,其中,dx为点迹与航迹在x轴方向的坐标差值,dy为点迹与航迹在y轴方向的坐标差值,dv为点迹与航迹的速度差值,ax为x轴方向的加权系数,ay为y轴方向的加权系数,av为速度加权系数;根据加权欧式距离生成点迹与航迹的距离矩阵。
4、作为上述方案的改进,所述根据所述距离矩阵关联所述点迹与航迹,并更新已关联航迹中航点的测量值的步骤包括:遍历所述距离矩阵,由小至大依次匹配第一预设阈值范围内的加权欧式距离,并将匹配到的航迹标记为已关联航迹;更新已关联航迹中航点的测量值。
5、作为上述方案的改进,所述根据所述点云密度集合更新未关联航迹中航点的测量值,并将已更新测量值的未关联航迹标记为已关联航迹,将未更新测量值的未关联航迹进行失联计数的步骤包括:对未关联航迹进行以下处理,其中,当航迹的点云密度大于第二预设阈值时,计算相邻点的x轴坐标均值、y轴坐标均值及速度均值以更新航迹的测量值,并将对应航迹标记为已关联航迹,当航迹的点云密度小于或等于第二预设阈值时,计算航迹在静点云下的静点云密度,当所述静点云密度大于第三预设阈值时,计算相邻点的x轴坐标均值及y轴坐标均值,将速度置为0以更新航迹的测量值,并将对应航迹标记为已关联航迹,当所述静点云密度小于或等于第三预设阈值时,将对应航迹标记为未关联航迹,并对未关联航迹进行失联计数。
6、作为上述方案的改进,通过解速度模糊算法更新已关联航迹中航点的测量值。
7、作为上述方案的改进,更新已关联航迹中航点的测量值时,评估卡尔曼滤波的误差,当误差大于预设误差时,更新卡尔曼协方差。
8、作为上述方案的改进,通过卡尔曼滤波对剩余的航迹进行修正处理。
9、相应地,本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述路侧毫米波雷达多帧关联滤波方法的步骤。
10、相应地,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述路侧毫米波雷达多帧关联滤波方法的步骤。
11、实施本发明,具有如下有益效果:
12、本发明计算欧式距离时,在考虑x轴方向的坐标及y轴方向的坐标的前提下,还增加了速度的维度,从而实现了多维度(x坐标,y坐标,速度)的计算,计算结果更为可靠;
13、同时,针对遍历时无法关联的航迹,本发明引入点云密度集合,通过点云密度集合对未关联航迹进行二次筛选关联,从而解决并排车的问题。
技术特征:
1.一种路侧毫米波雷达多帧关联滤波方法,其特征在于,包括:
2.如权利要求1所述的路侧毫米波雷达多帧关联滤波方法,其特征在于,所述计算所述点迹与航迹之间的加权欧式距离,以生成距离矩阵的步骤包括:
3.如权利要求1所述的路侧毫米波雷达多帧关联滤波方法,其特征在于,所述根据所述距离矩阵关联所述点迹与航迹,并更新已关联航迹中航点的测量值的步骤包括:
4.如权利要求1所述的路侧毫米波雷达多帧关联滤波方法,其特征在于,所述根据所述点云密度集合更新未关联航迹中航点的测量值,并将已更新测量值的未关联航迹标记为已关联航迹,将未更新测量值的未关联航迹进行失联计数的步骤包括:
5.如权利要求3所述的路侧毫米波雷达多帧关联滤波方法,其特征在于,通过解速度模糊算法更新已关联航迹中航点的测量值。
6.如权利要求3所述的路侧毫米波雷达多帧关联滤波方法,其特征在于,更新已关联航迹中航点的测量值时,评估卡尔曼滤波的误差,当误差大于预设误差时,更新卡尔曼协方差。
7.如权利要求3所述的路侧毫米波雷达多帧关联滤波方法,其特征在于,通过卡尔曼滤波对剩余的航迹进行修正处理。
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本发明公开了一种路侧毫米波雷达多帧关联滤波方法、设备及可读存储介质,涉及雷达信号处理技术领域,所述方法包括:计算点迹与航迹之间的加权欧式距离,以生成距离矩阵;计算所述航迹在点云下的点云密度集合;根据所述距离矩阵关联所述点迹与航迹,并更新已关联航迹中航点的测量值;根据所述点云密度集合更新未关联航迹中航点的测量值,并将已更新测量值的未关联航迹标记为已关联航迹,将未更新测量值的未关联航迹进行失联计数;删除失联计数超过预设次数的航迹;对剩余的航迹进行修正处理;输出连续关联次数大于预设次数的航迹。本发明引入点云密度集合,可解决并排车的问题,结果更为可靠。
技术研发人员:陈啟信,陈启达,黄达森
受保护的技术使用者:佛山市青松科技股份有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!