飞行器的位姿确定方法、装置、电子设备及存储介质与流程
本申请涉及飞行器,更具体地,涉及一种飞行器的位姿确定方法、装置、电子设备及存储介质。
背景技术:
1、随着科技的快速发展,飞行器在日产生活中的使用范围也越来越广。目前飞行器的传统导航技术一般依赖于机外传感器(例如全球导航卫星系统)和机载传感器(例如视觉传感器和惯性传感器)来估计飞行器的位姿。但是,由于机外传感器进行定位容易受外部环境影响,而机载传感器可通过滤波方法和图优化方法来进行定位。但是图优化方法计算量大,定位过程可能需要迭代多次,无法满足实时性的要求,滤波方法容易造成误差累积。因此,如何能够实时且准确的确定飞行器的位姿成为亟待解决的问题。
技术实现思路
1、有鉴于此,本申请实施例提出了一种飞行器的位姿确定方法、装置、电子设备及存储介质,以改善上述问题。
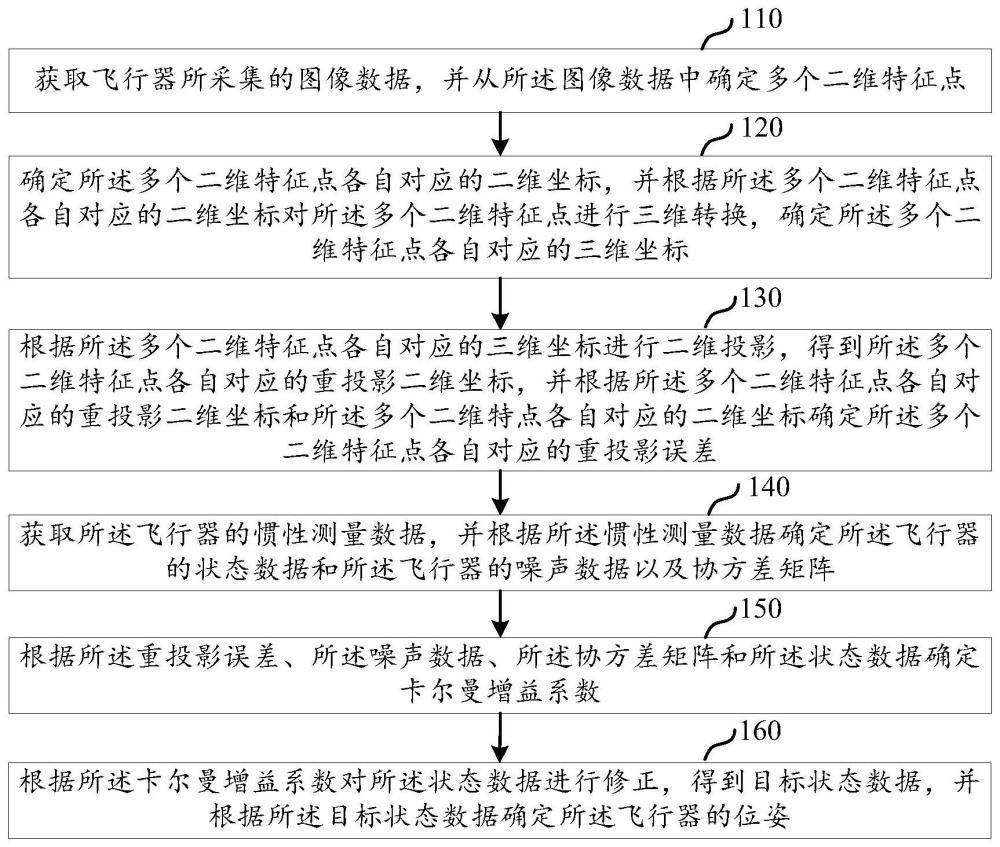
2、根据本申请实施例的一个方面,提供了一种飞行器的位姿确定方法,所述方法包括:获取飞行器所采集的图像数据,并从所述图像数据中确定多个二维特征点;确定所述多个二维特征点各自对应的二维坐标,并根据所述多个二维特征点各自对应的二维坐标对所述多个二维特征点进行三维转换,确定所述多个二维特征点各自对应的三维坐标;根据所述多个二维特征点各自对应的三维坐标进行二维投影,得到所述多个二维特征点各自对应的重投影二维坐标,并根据所述多个二维特征点各自对应的重投影二维坐标和所述多个二维特点各自对应的二维坐标确定所述多个二维特征点各自对应的重投影误差;获取所述飞行器的惯性测量数据,并根据所述惯性测量数据确定所述飞行器的状态数据、所述飞行器的噪声数据以及协方差矩阵;根据所述重投影误差、所述噪声数据、所述协方差矩阵和所述状态数据确定卡尔曼增益系数;根据所述卡尔曼增益系数对所述状态数据进行修正,得到目标状态数据,并根据所述目标状态数据确定所述飞行器的位姿。
3、根据本申请实施例的一个方面,提供了一种飞行器的位姿确定装置,所述装置包括:二维特征点确定模块,用于获取飞行器所采集的图像数据,并从所述图像数据中确定多个二维特征点;三维转换模块,用于确定所述多个二维特征点各自对应的二维坐标,并根据所述多个二维特征点各自对应的二维坐标对所述多个二维特征点进行三维转换,确定所述多个二维特征点各自对应的三维坐标;重投影误差确定模块,用于根据所述多个二维特征点各自对应的三维坐标进行二维投影,得到所述多个二维特征点各自对应的重投影二维坐标,并根据所述多个二维特征点各自对应的重投影二维坐标和所述多个二维特点各自对应的二维坐标确定所述多个二维特征点各自对应的重投影误差;数据确定模块,用于获取所述飞行器的惯性测量数据,并根据所述惯性测量数据确定所述飞行器的状态数据和所述飞行器的噪声数据以及协方差矩阵;增益系数确定模块,用于根据所述重投影误差、所述噪声数据、所述协方差矩阵和所述状态数据确定卡尔曼增益系数;位姿确定模块,用于根据所述卡尔曼增益系数对所述状态数据进行修正,得到目标状态数据,并根据所述目标状态数据确定所述飞行器的位姿。
4、根据本申请实施例的一个方面,提供了一种电子设备,包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现如上所述飞行器的位姿确定方法。
5、根据本申请实施例的一个方面,提供了一种计算机可读存储介质,其上存储有计算机可读指令,当所述计算机可读指令被处理器执行时,实现如上所述飞行器的位姿确定方法。
6、在本申请的方案中,先根据图像数据中对应的多个二维特征点各自对应的二维坐标来进行三维转换,得到多个二维特征点各自对应的三维坐标,进而根据多个二维特征点各自对应的三维坐标进行重投影,得到多个二维特征点各自对应的重投影二维坐标,以此根据多个二维特征点各自对应的重投影二维坐标和多个二维特点各自对应的二维坐标确定多个二维特征点各自对应的重投影误差,然后根据惯性测量数据确定飞行器的状态数据和飞行器的噪声数据和协方差矩阵,以此能够根据多个二维特征点各自对应的重投影误差、飞行器的状态数据、协方差矩阵和飞行器的噪声数据来确定卡尔曼增益系数,最后能够根据卡尔曼增益系数来进行卡尔曼滤波,来对状态数据进行修正,得到目标状态数据,以此根据目标状态数据来确定飞行器的位姿。本申请通过对图像数据中的每一图像帧通过滤波融合视觉和imu来估计飞行器的位姿,能够实时确定飞行器的位姿,保证了飞行器的位姿的确定的实时性高同时提高位姿的准确性。
7、应当理解的是,以上的一般描述和后文细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种飞行器的位姿确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述图像数据包括多帧图像,在所述根据所述卡尔曼增益系数、所述协方差矩阵以及所述二维特征点各自对应的重投影误差对所述状态数据进行修正,得到目标状态数据,并根据所述目标状态数据确定所述飞行器的位姿之后,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述在所述多帧图像中确定关键帧图像,包括:
4.根据权利要求2所述的方法,其特征在于,所述在所述多帧图像中确定关键帧图像,包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述关键惯性测量数据和所述关键帧图像对应的特征点,确定目标函数,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述获取飞行器所采集的图像数据,并根据所述图像数据确定多个二维特征点,包括:
7.根据权利要求1-5任一项所述的方法,其特征在于,所述根据所述多个二维特征点各自对应的二维坐标对所述多个二维特征点进行三维转换,确定所述多个二维特征点各自对应的三维坐标,包括:
8.根据权利要求1所述的方法,其特征在于,在所述根据所述多个二维特征点各自对应的二维坐标对所述多个二维特征点进行三维转换,确定所述多个二维特征点各自对应的三维坐标之后,所述方法还包括:
9.一种飞行器的位姿确定装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,所述电子设备包括:
11.一种计算机可读取存储介质,其特征在于,所述计算机可读取存储介质中存储有程序代码,所述程序代码可被处理器调用执行如权利要求1至8任一项所述的方法。
技术总结
本申请提供了一种飞行器的位姿确定方法、装置、电子设备及存储介质,包括:在图像数据中确定多个二维特征点;确定多个二维特征点各自对应的二维坐标,并根据多个二维特征点各自对应的二维坐标确定多个二维特征点各自对应的三维坐标;根据多个二维特征点各自对应的三维坐标确定多个二维特征点各自对应的重投影误差;根据惯性测量数据确定飞行器的状态数据和飞行器的噪声数据以及协方差矩阵;根据噪声数据、协方差矩阵和状态数据确定卡尔曼增益系数;根据卡尔曼增益系数对状态数据进行修正,得到目标状态数据,并根据目标状态数据确定飞行器的位姿。本申请能够实时且准确的确定飞行器的位姿。
技术研发人员:周巧,陶永康,彭登,董博,傅志刚,陈昱名
受保护的技术使用者:广东汇天航空航天科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!