一种用于提高摄像机移动方位准确性的方法与流程
本发明涉及摄像机移动定位,更具体地的说,涉及一种用于提高摄像机移动方位准确性的方法。
背景技术:
1、摄像机移动应用通常有机器人巡航、车载巡航等场景,在此类场景下需要将方位数据作为osd叠加在视频上。机器人巡航过程中的方位寻找主要依靠设备本身的电子罗盘,车载巡航常常依据卫星定位来寻找方,但是卫星定位存在信号可靠性问题,受道路环境、城市布局等影响,信号不稳定,地面道路时信号较好,隧道、城市峡谷等路况时信号较差;电子罗盘的实时数据会受到环境温度、外界磁场、内部磁场等方面影响,在移动过程中,电子罗盘的实时数据漂移、偏差很大,导致摄像机的方位显示偏差大。
技术实现思路
1、为了解决上述背景技术中提出的问题,本发明提供一种用于提高摄像机移动方位准确性的方法。
2、本发明提供的一种用于提高摄像机移动方位准确性的方法采用如下的技术方案:
3、一种用于提高摄像机移动方位准确性的方法,包括如下步骤:
4、步骤一、摄像机移动过程中,利用卫星定向模块接收到的gps信号进行定向,仅需要获取两次gps数据输入到主芯片中,经过主芯片的算法得出摄像机移动的方向θ1;
5、步骤二、摄像机移动过程中,摄像机通过电子罗盘自身的坐标信息与加速度仪自身的坐标信息、设备自身的坐标信息传输到主芯片上,通过算法得出大地坐标系,然后主芯片根据大地坐标数据和电子罗盘提供的方向数据,使主芯片根据人为标定方向控制摄像机移动方向;
6、步骤三、同时摄像机移动过程中,由于gps信号存在数据可靠性问题,通过电子罗盘自身的坐标系的数据与步骤二中的大地坐标系的数据通过算法得出电子罗盘自身的方向θ2;
7、步骤四、在摄像机移动过程中,通过陀螺仪传感器数据对载体进行运动的过程识别,确定摄像机移动的方向是否正确,如果移动方向出现偏差时,能及时的对卫星定向方向结果进行纠偏,提高了摄像机移动的精度;
8、步骤五、在将标定方向的数据输入到主芯片中,主芯片将人为标定方向的数据和步骤一中摄像机移动的方向数据通过算法得出标定转换矩阵θcali,用于消除电子罗盘和加速度仪的精度、安装过程等带来的误差数据;
9、步骤六、由于由于gps信号存在数据可靠性问题,主芯片将电子罗盘自身的方向数据和摄像机移动的方向数据通过模糊算法得出摄像机的方向θ;
10、步骤七、主芯片将标定数据和卫星定向数据、电子罗盘和加速度仪计算出的定向数量、模糊算法得出定向数据进行对比,得出四个定向数据相同,进而得出摄像机准确的移动方向。
11、优选的,所述步骤一中计算出摄像机移动方向的算法为:
12、
13、优选的,所述步骤二中计算出大地坐标系的算法为:
14、
15、优选的,所述步骤三中计算出电子罗盘方向的算法为:
16、——点m在大地坐标系下的坐标信息;
17、mm=cm-a·ca-o·mo——点m转换到电子罗盘坐标系的过程;
18、——点m在电子罗盘坐标系的坐标信息;
19、则可以得到电子罗盘的方位结果为加上磁偏角δθ则是实际方位结果:
20、θ2=θnorth_2_east+δθ。
21、优选的,所述步骤五中计算出标定转换矩阵θcali的算法为:
22、θcali=θ1+δθ1;
23、令θcali=θ2即可得到标定转换矩阵。
24、优选的,所述步骤六中模糊算法为:
25、θ=p1·θ1+p2·θ2。
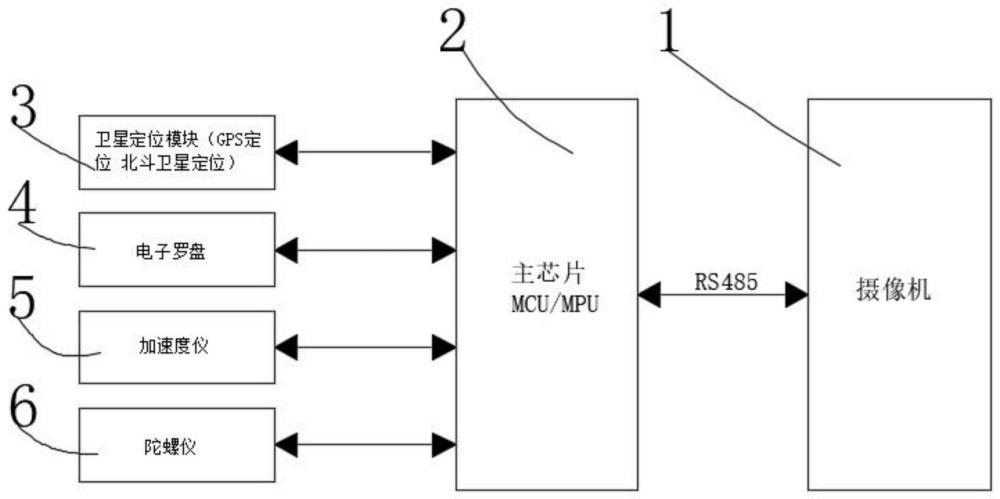
26、优选的,所述主芯片的输入端与陀螺仪的输出端电连接,所述加速度仪的输出端与主芯片的输入端电连接,所述电子罗盘的输出端与主芯片的输入端电连接,所述卫星定位模块的输出端与主芯片的输入端电连接,所述主芯片与摄像机之间通过rs485通讯。
27、综上所述,本发明包括以下有益技术效果:
28、本发明通过卫星定向模块接收两次gps信号、电子罗盘和加速度仪、主芯片的模糊算法,得出三次摄像机移动的方向,三次摄像机移动的方向与输入的标定方向对比,得出四个定向数据相同,从而实现了对摄像机移动时的方向准确定位的目的。
技术特征:
1.一种用于提高摄像机移动方位准确性的方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种用于提高摄像机移动方位准确性的方法,其特征在于:所述步骤一中计算出摄像机(1)移动方向的算法为:
3.根据权利要求1所述的一种用于提高摄像机移动方位准确性的方法,其特征在于:所述步骤二中计算出大地坐标系的算法为:
4.根据权利要求1所述的一种用于提高摄像机移动方位准确性的方法,其特征在于:所述步骤三中计算出电子罗盘(4)方向的算法为:
5.根据权利要求1所述的一种用于提高摄像机移动方位准确性的方法,其特征在于:所述步骤五中计算出标定转换矩阵θcali的算法为:
6.根据权利要求1所述的一种用于提高摄像机移动方位准确性的方法,其特征在于:所述步骤六中模糊算法为:
7.根据权利要求1所述的一种用于提高摄像机移动方位准确性的方法,其特征在于:所述主芯片(2)的输入端与陀螺仪(6)的输出端电连接,所述加速度仪(5)的输出端与主芯片(2)的输入端电连接,所述电子罗盘(4)的输出端与主芯片(2)的输入端电连接,所述卫星定位模块(3)的输出端与主芯片(2)的输入端电连接,所述主芯片(2)与摄像机(1)之间通过rs485通讯。
技术总结
本发明涉及摄像机移动定位技术领域,且公开了一种用于提高摄像机移动方位准确性的方法,包括如下步骤:摄像机移动过程中,利用卫星定向模块接收到的两次GPS信号进行定向的数据输入到主芯片中,经过主芯片的算法得出摄像机移动的方向θ1,摄像机通过电子罗盘、加速度仪、设备的各个坐标信息传输到主芯片上,通过算法得出大地坐标系,然后主芯片根据大地坐标数据和电子罗盘提供的方向数据,本发明通过卫星定向模块接收两次GPS信号、电子罗盘和加速度仪、主芯片的模糊算法,得出三次摄像机移动的方向,三次摄像机移动的方向与输入的标定方向对比,得出四个定向数据相同,从而实现了对摄像机移动时的方向准确定位的目的。
技术研发人员:倪利明,陶连日,王婉,盛林光,占胜
受保护的技术使用者:浙江双视科技股份有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!