基于车联万物辅助的车辆定位方法、装置、设备及介质与流程
本发明涉及车辆,尤其涉及一种基于车联万物辅助的车辆定位方法、装置、设备及介质。
背景技术:
1、自动驾驶车辆进入无全球导航卫星系统(global navigation satellitesystem,gnss)环境后(如室内停车场、隧道)一般通过即时定位与地图构建(simultaneouslocalization and mapping,slam)技术进行自车位置识别。当前slam定位的实现一般如下:车辆先提前进入环境内,完成全局采图与建图工作,当车辆再次进入到环境内时,则基于实时建立的局部图与先前构建的全局图进行匹配,实现自身的实时位置识别。
2、并且由于不同车辆配置的感知设备性能参数、安装位置、倾角存在差异,不同车型之间的slam地图暂未能实现直接共享使用,导致当前slam地图与车辆定位还是强耦合状态,slam地图也基本自建自用模式,只有同车型之间实现slam图共享使用。
3、slam地图与定位强耦合将导致在真实的应用场景中存在如下问题:1)车辆初次进入某个无gnss环境,无法启动该场景下的自动驾驶功能,必须依赖自车(或同车型)提前构建的全局地图;2)一次无法实现全局地图数据采集,需要多次进入该环境内进行采图并对全局地图进行修正。比如停车场环境,车位存在被占用情况,需要车辆多次进入停车场重复建图,实现车位信息采集;3)车端存储的slam全局地图数据更新存在滞后性。
技术实现思路
1、本发明实施例提供了一种基于车联万物辅助的车辆定位方法、装置、设备及介质,实现了借助v2x技术将slam地图与定位解耦,基于路侧提供的slam地图就能实现实时slam高精定位,避免了自车重复构建slam地图,提高了车辆定位效率。
2、第一方面,本发明实施例提供了一种基于车联万物辅助的车辆定位方法,包括:
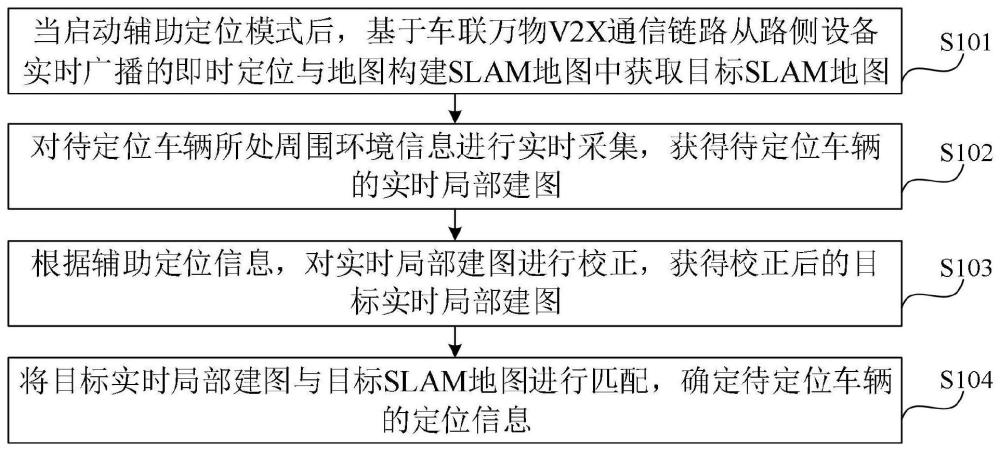
3、当启动辅助定位模式后,基于车联万物v2x通信链路从路侧设备实时广播的即时定位与地图构建slam地图中获取目标slam地图,所述目标slam地图关联有辅助定位信息;
4、对待定位车辆所处周围环境信息进行实时采集,获得所述待定位车辆的实时局部建图;
5、根据所述辅助定位信息,对所述实时局部建图进行校正,获得校正后的目标实时局部建图;
6、将所述目标实时局部建图与所述目标slam地图进行匹配,确定所述待定位车辆的定位信息。
7、第二方面,本发明实施例提供了一种基于车联万物辅助的车辆定位装置,包括:
8、地图获取模块,用于当启动辅助定位模式后,基于车联万物v2x通信链路从路侧设备实时广播的即时定位与地图构建slam地图中获取目标slam地图,所述目标slam地图关联有辅助定位信息;
9、局部建图模块,用于对待定位车辆所处周围环境信息进行实时采集,获得所述待定位车辆的实时局部建图;
10、建图校正模块,用于根据所述辅助定位信息,对所述实时局部建图进行校正,获得校正后的目标实时局部建图;
11、定位匹配模块,用于将所述目标实时局部建图与所述目标slam地图进行匹配,确定所述待定位车辆的定位信息。
12、第三方面,本发明实施例还提供一种电子设备,其特征在于,包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面实施例所述的基于车联万物辅助的车辆定位方法。
16、第四方面,本发明实施例还提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如第一方面实施例所述的基于车联万物辅助的车辆定位方法。
17、本发明实施例提供了一种基于车联万物辅助的车辆定位方法、装置、设备及介质,该方法包括:当启动辅助定位模式后,基于车联万物v2x通信链路从路侧设备实时广播的即时定位与地图构建slam地图中获取目标slam地图,所述目标slam地图关联有辅助定位信息;对待定位车辆所处周围环境信息进行实时采集,获得所述待定位车辆的实时局部建图;根据所述辅助定位信息,对所述实时局部建图进行校正,获得校正后的目标实时局部建图;将所述目标实时局部建图与所述目标slam地图进行匹配,确定所述待定位车辆的定位信息。区别于现有技术中在通过slam技术进行自车定位时所使用的slam地图是自建自用模式,不同车辆构建的slam地图往往不能通用,上述技术方案,借助v2x技术助力车辆slam地图与定位解耦。通过v2x通信链路提供的场端信息服务,车辆不强依赖自车提前建立全局slam地图,能够基于他方(如场端/路侧)提供的slam地图数据,也能实现实时slam高精定位,且不要求采集该slam地图数据时所使用的车型、传感器参数等工具与自车配置一致,避免了自车重复构建slam地图,提高了车辆定位效率,节约了构建slam地图的成本。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种基于车联万物辅助的车辆定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括:通过所述路侧设备实时广播所述slam地图,所述slam地图包括全局slam地图或者全路径slam地图。
3.根据权利要求2所述的方法,其特征在于,所述通过所述路侧设备实时广播所述slam地图,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于车联万物v2x通信链路从路侧设备实时广播的即时定位与地图构建slam地图中获取目标slam地图,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述辅助定位信息,对所述实时局部建图进行校正,获得校正后的目标实时局部建图,包括:
6.根据权利要求1所述的方法,其特征在于,所述将所述目标实时局部建图与所述目标slam地图进行匹配,确定所述待定位车辆的定位信息,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述相对坐标信息,将所述目标实时建图与所述slam地图进行匹配,确定所述待定位车辆的定位信息,包括:
8.根据权利要求1所述的方法,其特征在于,还包括:
9.根据权利要求1所述的方法,其特征在于,在启动辅助定位模式之前,还包括:
10.一种基于车联万物辅助的车辆定位装置,其特征在于,包括:
11.一种电子设备,其特征在于,包括:
12.一种包含计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-9任一项所述的基于车联万物辅助的车辆定位方法。
技术总结
本发明实施例提供了一种基于车联万物辅助的车辆定位方法、装置、设备及介质,该方法包括:当启动辅助定位模式后,基于车联万物V2X通信链路从路侧设备实时广播的即时定位与地图构建SLAM地图中获取目标SLAM地图,目标SLAM地图关联有辅助定位信息;对待定位车辆所处周围环境信息进行实时采集,获得待定位车辆的实时局部建图;根据辅助定位信息,对实时局部建图进行校正,获得校正后的目标实时局部建图;将目标实时局部建图与目标SLAM地图进行匹配,确定待定位车辆的定位信息。利用该方法,借助V2X技术将SLAM地图与定位解耦,车辆不强依赖自车提前建立SLAM地图,而是基于他方提供的SLAM地图就能实现实时SLAM高精定位,避免了自车重复构建SLAM地图,提高了车辆定位效率。
技术研发人员:王吟松,赵晨,刁秀玮,张广岐,汪付
受保护的技术使用者:星觅(上海)科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!