路径规划方法、装置、电子设备和存储介质与流程
本发明涉及机器人,尤其涉及一种路径规划方法、装置、电子设备和存储介质。
背景技术:
1、随着社会科技的不断发展,各式各样的机器人已在人们的生活工作中普及,如家务机器人、陪伴机器人等。导航模块作为移动型机器人实现空间移动功能的关键模块,其高准确性、高效等特点一直备受研究人员及工程人员的关注。
2、相关技术中,移动型机器人的导航路径规划算法通常是基于低分辨率的全局栅格代价地图进行路径规划,具体为:获取低分辨率的全局栅格代价地图、机器人的当前位置和目标位置,基于低分辨率的全局栅格代价地图、当前位置和目标位置进行路径规划,得到机器人的导航路径。
3、但上述相关技术中,是基于低分辨率的全局栅格代价地图进行路径规划的,从而导致所规划出的导航路径的准确性较低。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种路径规划方法、装置、电子设备和存储介质。
2、本发明提供一种路径规划方法,包括:
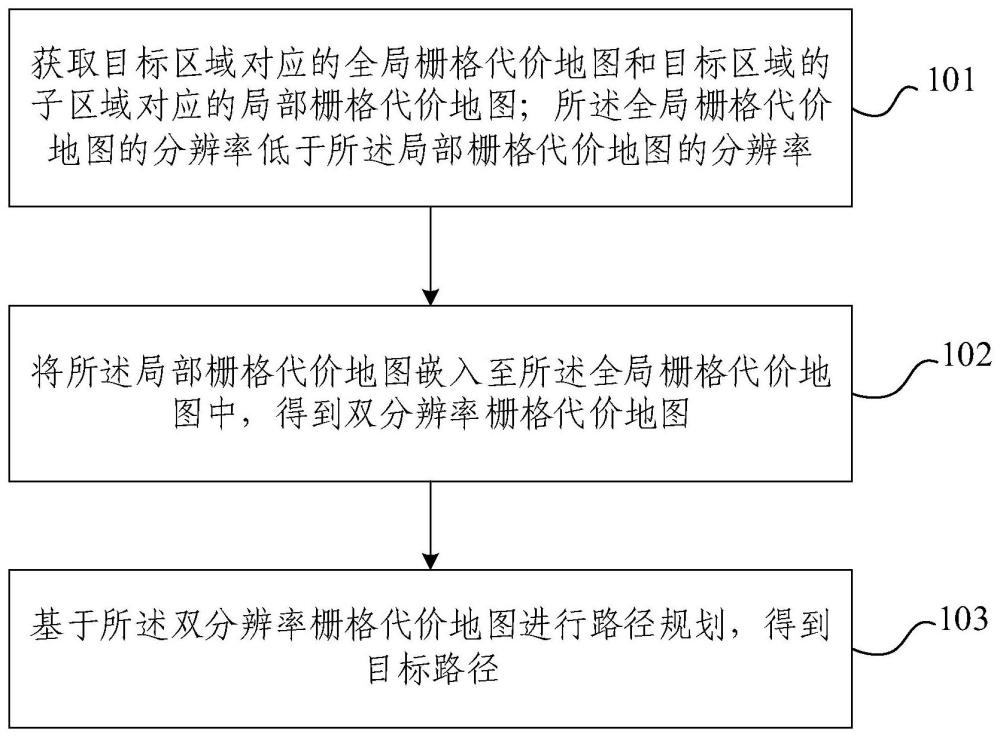
3、获取目标区域对应的全局栅格代价地图和所述目标区域的子区域对应的局部栅格代价地图;所述全局栅格代价地图的分辨率低于所述局部栅格代价地图的分辨率;
4、将所述局部栅格代价地图嵌入至所述全局栅格代价地图中,得到双分辨率栅格代价地图;
5、基于所述双分辨率栅格代价地图进行路径规划,得到目标路径。
6、根据本发明提供的一种路径规划方法,所述基于所述双分辨率栅格代价地图进行路径规划,包括:
7、在基于所述双分辨率栅格代价地图进行栅格节点的搜索过程中,在从第一全局栅格节点搜索到与所述第一全局栅格节点相邻的至少两个第一局部栅格节点的情况下,针对各所述第一局部栅格节点,确定从所述第一局部栅格节点开始搜索是否可搜索到表征目标位置的栅格节点;所述第一局部栅格节点的分辨率高于所述第一全局栅格节点的分辨率;
8、在确定从所述第一局部栅格节点开始搜索可搜索到表征目标位置的栅格节点的情况下,将所述第一全局栅格节点和所述第一局部栅格节点所属的路径确定为所述目标路径。
9、根据本发明提供的一种路径规划方法,所述基于所述双分辨率栅格代价地图进行路径规划,包括:
10、在基于所述双分辨率栅格代价地图进行栅格节点的搜索过程中,在从至少两个第二局部栅格节点均搜索到相邻的同一第二全局栅格节点的情况下,确定从所述第二全局栅格节点开始搜索是否可搜索到表征目标位置的栅格节点;所述第二局部栅格节点的分辨率高于所述第二全局栅格节点的分辨率;
11、在确定从所述第二全局栅格节点开始搜索可搜索到表征目标位置的栅格节点的情况下,将所述第二全局栅格节点和各所述第二局部栅格节点所属的路径均确定为所述目标路径。
12、根据本发明提供的一种路径规划方法,所述方法还包括:
13、从所述目标路径中与起始采样点非相邻的第一个第一采样点开始遍历,将所述起始采样点和当前遍历的第一采样点基于平滑插值方式进行连接,得到平滑插值曲线;所述起始采样点为所述目标路径中的起始位置对应的采样点;
14、对所述平滑插值曲线进行采样,得到至少一个第二采样点;
15、在确定各所述第二采样点在所述双分辨率栅格代价地图上的代价值均小于障碍物阈值的情况下,采用所述平滑插值曲线替换所述目标路径中从所述起始采样点到所述当前遍历的第一采样点之间的子路径,直至在新的平滑插值曲线中存在采样点在所述双分辨率栅格代价地图上的代价值大于或等于所述障碍物阈值;
16、将当前遍历的第一采样点的前一个采样点确定为新的起始采样点,并返回至所述从所述目标路径中与起始采样点非相邻的第一个第一采样点开始遍历的步骤,直至遍历至所述目标路径的终止采样点,得到平滑后的目标路径;所述终止采样点为所述目标路径中的终止位置对应的采样点。
17、根据本发明提供的一种路径规划方法,所述方法还包括:
18、在确定存在目标第二采样点在所述双分辨率栅格代价地图上的代价值大于或等于所述障碍物阈值的情况下,禁止采用所述平滑插值曲线替换所述目标路径中从所述起始采样点到所述当前遍历的第一采样点之间的子路径。
19、根据本发明提供的一种路径规划方法,所述子区域的中心位置与所述目标区域的中心位置重合、且所述子区域的尺寸为预设尺寸;
20、所述将所述局部栅格代价地图嵌入至所述全局栅格代价地图中,得到双分辨率栅格代价地图,包括:
21、基于所述目标区域的中心位置和所述预设尺寸,在所述全局栅格代价地图中查找与所述子区域对应的子栅格代价地图;
22、采用所述局部栅格代价地图替换所述子栅格代价地图,得到所述双分辨率栅格代价地图。
23、根据本发明提供的一种路径规划方法,所述方法还包括:
24、基于局部路径规划算法和所述目标路径,执行目标任务。
25、本发明还提供一种路径规划装置,包括:
26、获取单元,用于获取目标区域对应的全局栅格代价地图和所述目标区域的子区域对应的局部栅格代价地图;所述全局栅格代价地图的分辨率低于所述局部栅格代价地图的分辨率;
27、嵌入单元,用于将所述局部栅格代价地图嵌入至所述全局栅格代价地图中,得到双分辨率栅格代价地图;
28、路径规划单元,用于基于所述双分辨率栅格代价地图进行路径规划,得到目标路径。
29、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述路径规划方法。
30、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述路径规划方法。
31、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述路径规划方法。
32、本发明提供的路径规划方法、装置、电子设备和存储介质,获取目标区域对应的全局栅格代价地图和目标区域的子区域对应的局部栅格代价地图;全局栅格代价地图的分辨率低于局部栅格代价地图的分辨率,将局部栅格代价地图嵌入至全局栅格代价地图中,得到双分辨率栅格代价地图,基于双分辨率栅格代价地图进行路径规划,得到目标路径。可知,本发明是基于全局栅格代价地图和局部栅格代价地图组成的双分辨率栅格代价地图进行路径规划,提高了双分辨率栅格代价地图的精度,进一步提高了路径规划的准确性。
技术特征:
1.一种路径规划方法,其特征在于,包括:
2.根据权利要求1所述的路径规划方法,其特征在于,所述基于所述双分辨率栅格代价地图进行路径规划,包括:
3.根据权利要求1所述的路径规划方法,其特征在于,所述基于所述双分辨率栅格代价地图进行路径规划,包括:
4.根据权利要求1-3任一项所述的路径规划方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的路径规划方法,其特征在于,所述方法还包括:
6.根据权利要求1-3任一项所述的路径规划方法,其特征在于,所述子区域的中心位置与所述目标区域的中心位置重合、且所述子区域的尺寸为预设尺寸;
7.根据权利要求1-3任一项所述的路径规划方法,其特征在于,所述方法还包括:
8.一种路径规划装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述路径规划方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述路径规划方法。
技术总结
本发明提供一种路径规划方法、装置、电子设备和存储介质,涉及机器人技术领域,其中方法包括:获取目标区域对应的全局栅格代价地图和所述目标区域的子区域对应的局部栅格代价地图;所述全局栅格代价地图的分辨率低于所述局部栅格代价地图的分辨率;将所述局部栅格代价地图嵌入至所述全局栅格代价地图中,得到双分辨率栅格代价地图;基于所述双分辨率栅格代价地图进行路径规划,得到目标路径。本发明是基于全局栅格代价地图和局部栅格代价地图组成的双分辨率栅格代价地图进行路径规划,提高了双分辨率栅格代价地图的精度,进一步提高了路径规划的准确性。
技术研发人员:郑抗,潘清华,胡国平,陈旭,龙明康
受保护的技术使用者:科大讯飞股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!