适用于扫地机器人的高频传感器的制作方法
本申请涉及超声波传感器的,尤其涉及一种适用于扫地机器人的高频传感器。
背景技术:
1、市场上扫地机器人使用的高频传感器,其探测角度θ在9°(at-6db)左右,当传感器正对着障碍物时,传感器灵敏度最大,而当传感器向左(或者向右)倾斜4.5°左右,传感器的灵敏度就会急剧下降到约原来的一半,如图1所示。
2、正常情况下,为了获取最大的灵敏度,高频传感器是按照垂直于地面的方式安装于扫地机器人内部。然而扫地机器人在实际的场景应用中,会存在过门槛的情况,在扫地机器人运动爬升门槛时,高频传感器就会与障碍物之间形成一定的倾角,这个倾角往往大于现有高频传感器的探测角度θ(at-6db)的1/2,从而导致高频传感器的灵敏度会很弱(甚至没有),这就极大地增加的扫地机器人准确识别门槛的难度。
技术实现思路
1、为克服相关技术中存在的问题,本申请提供一种适用于扫地机器人的高频传感器,该高频传感器的探测角度增大,提高高频传感器的灵敏度,使得扫地机器人容易准确地识别出门槛。
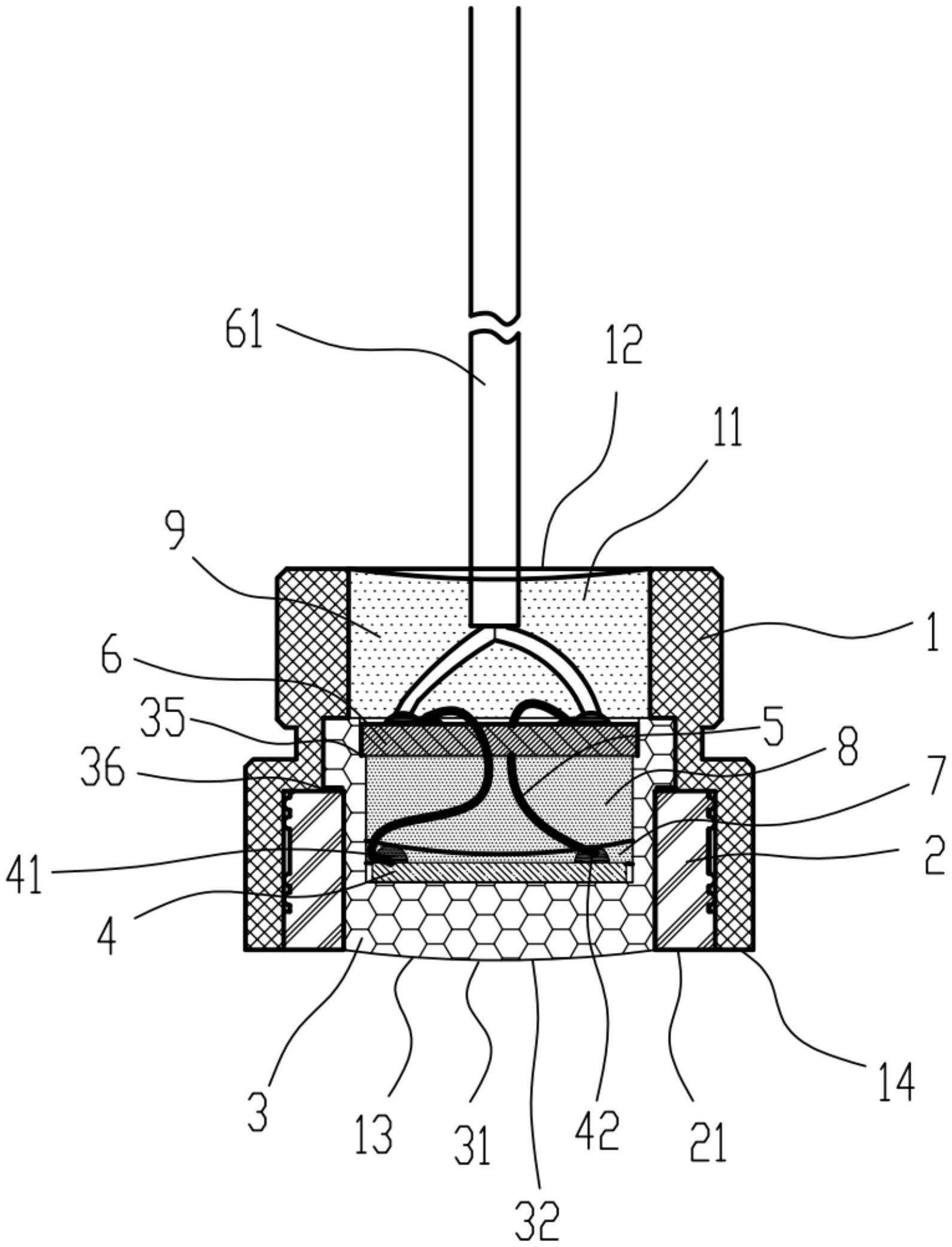
2、本申请提供一种适用于扫地机器人的高频传感器,包括:壳套,所述壳套内设有空腔,所述空腔内设有胶圈,所述胶圈内设有匹配层壳体,所述匹配层壳体内设有压电陶瓷片,所述压电陶瓷片上连接有漆包线,所述漆包线连接有转接电路板,所述转接电路板上连接有屏蔽线,所述屏蔽线引出至所述空腔外;所述匹配层壳体上设有发射面,所述发射面设有突出于所述空腔的凸出部。
3、优选地,所述壳套设有第一端面,所述胶圈设有第二端面,所述第一端面与所述第二端面平齐,所述凸出部突出于所述第一端面。
4、优选地,所述匹配层壳体上设有凹槽,所述压电陶瓷片粘接于所述凹槽的底面上。
5、优选地,所述底面为平整的平面,所述平面与所述凹槽的横向的水平面平行设置。
6、优选地,所述凸出部为半球状,所述凸出部的弦高为a,a/2到凹槽内壁的所述底面的距离设定为匹配层的厚度t,t=λ/4,λ为超声波波长,其中弦高a的取值范围满足:0≤a/2≤λ/4。
7、优选地,所述压电陶瓷片上设有第一阻尼层,所述第一阻尼层上设有第二阻尼层,所述第一阻尼层与所述第二阻尼层位于所述压电陶瓷层与所述转接电路板之间。
8、优选地,所述凹槽的内壁上设有第一台阶,所述转接电路板放置于所述第一台阶上。
9、优选地,所述压电陶瓷片设有第一电极和第二电极,所述压电陶瓷片的上表面上设有分别与所述第一电极和所述第二电极连接的第一焊接点和第二焊接点,所述第一焊接点和所述第二焊接点分别与所述漆包线连接。
10、优选地,所述匹配层壳体外侧面设有第二台阶,所述胶圈抵接在所述第二台阶上,所述胶圈位于所述匹配层壳体与所述壳套之间。
11、优选地,所述凸出部与所述匹配层壳体一体成型。
12、本申请提供的技术方案可以包括以下有益效果:所述匹配层壳体上设有发射面,所述发射面设有突出于所述空腔的凸出部,所述凸出部突出于所述空腔,使得所述发射面的探测角度变大,盲区更小,该种高频传感器应用于扫地机器人上,可以更容易地识别到门槛,更容易地识别到前方的障碍物,提高该种高频传感器的灵敏度。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种适用于扫地机器人的高频传感器,其特征在于,包括:
2.根据权利要求1所述的适用于扫地机器人的高频传感器,其特征在于:所述壳套设有第一端面,所述胶圈设有第二端面,所述第一端面与所述第二端面平齐,所述凸出部突出于所述第一端面。
3.根据权利要求2所述的适用于扫地机器人的高频传感器,其特征在于:所述匹配层壳体上设有凹槽,所述压电陶瓷片粘接于所述凹槽的底面上。
4.根据权利要求3所述的适用于扫地机器人的高频传感器,其特征在于:所述底面为平整的平面,所述平面与所述凹槽的横向的水平面平行设置。
5.根据权利要求3所述的适用于扫地机器人的高频传感器,其特征在于:所述凸出部为半球状,所述凸出部的弦高为a,a/2到凹槽内壁的所述底面的距离设定为匹配层的厚度t,t=λ/4,λ为超声波波长,其中弦高a的取值范围满足:0≤a/2≤λ/4。
6.根据权利要求3所述的适用于扫地机器人的高频传感器,其特征在于:所述压电陶瓷片上设有第一阻尼层,所述第一阻尼层上设有第二阻尼层,所述第一阻尼层与所述第二阻尼层位于所述压电陶瓷层与所述转接电路板之间。
7.根据权利要求3所述的适用于扫地机器人的高频传感器,其特征在于:所述凹槽的内壁上设有第一台阶,所述转接电路板放置于所述第一台阶上。
8.根据权利要求1所述的适用于扫地机器人的高频传感器,其特征在于:所述压电陶瓷片设有第一电极和第二电极,所述压电陶瓷片的上表面上设有分别与所述第一电极和所述第二电极连接的第一焊接点和第二焊接点,所述第一焊接点和所述第二焊接点分别与所述漆包线连接。
9.根据权利要求1所述的适用于扫地机器人的高频传感器,其特征在于:所述匹配层壳体外侧面设有第二台阶,所述胶圈抵接在所述第二台阶上,所述胶圈位于所述匹配层壳体与所述壳套之间。
10.根据权利要求1所述的适用于扫地机器人的高频传感器,其特征在于:所述凸出部与所述匹配层壳体一体成型。
技术总结
本申请是关于一种适用于扫地机器人的高频传感器,包括:壳套,所述壳套内设有空腔,所述空腔内设有胶圈,所述胶圈内设有匹配层壳体,所述匹配层壳体内设有压电陶瓷片,所述压电陶瓷片上连接有漆包线,所述漆包线连接有转接电路板,所述转接电路板上连接有屏蔽线,所述屏蔽线引出至所述空腔外;所述匹配层壳体上设有发射面,所述发射面设有突出于所述空腔的凸出部。所述匹配层壳体上设有发射面,所述发射面设有突出于所述空腔的凸出部,所述凸出部突出于所述空腔,使得所述发射面的探测角度变大,盲区更小,该种高频传感器应用于扫地机器人上,可以更容易地识别到门槛,更容易地识别到前方的障碍物,提高该种高频传感器的灵敏度。
技术研发人员:张曙光,朱兆焱,叶勇勇,邹涛
受保护的技术使用者:广东奥迪威传感科技股份有限公司
技术研发日:20230109
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!