一种用于机器视觉检测的高自由度强联动性轴承成像装置
本技术涉及检测设备,具体为一种用于机器视觉检测的高自由度强联动性轴承成像装置。
背景技术:
1、当前,我国在轴承技术的创新方面取得了较大的进展,国家级的企业生产与研发中心的数量增长迅速,许多省级的企业创新创业平台在轴承的研发与生产领域取得了极大进展,但轴承技术的短板依然不可忽视.
2、我国在高端轴承研发领域相较于其他国家技术实力较弱,特别是对于轴承缺陷的检测在精度上还不能比较好的满足我国企业对于出口世界市场的标准需求;同时,我国企业对于轴承相关产品的检测精度技术力量各有不同,使得生产出来的产品性能不稳定,产出轴承的使用寿命与国际先进水平存在比较大的差距。
3、目前我国轴承企业的生产加工技术还未取得较大突破的原因之一是在轴承质量检测方面的效果不尽人意。据相关数据统计我国大部分企业采取人工检测的方式来进行轴承产品的检测,限制了轴承的检测质量,其次就是我国企业现有的检测仪器与流水线工作的配合效率相对不高,而配合流水线的检测仪器大多采用开放式,此时外部环境光会影响光照,从而产生噪声,影响通过工业相机获取的图像质量。光照是影响图像质量的重要因素之一,许多视觉检测项目失败的原因之一就是无法解决光照的问题。
4、基于此,本实用新型设计了一种用于机器视觉检测的高自由度强联动性轴承成像装置,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种用于机器视觉检测的高自由度强联动性轴承成像装置,现在我国采用的轴承检测设备多需要人工手动操作,与现代高效的流水线作业契合度欠佳,其次配合流水线的检测设备的结构设计大多采用开式,导致在检测时,工业相机获取的图像会受到外环境光的影响,产生不必要的噪声。本实用新型利用棘轮机构与黑色不透光玻璃来解决上述两个问题,采用本方案后可以使得检测作业的效率获得有效提升,提高获取图像的质量,同时不干扰工业机器人的分拣作业。
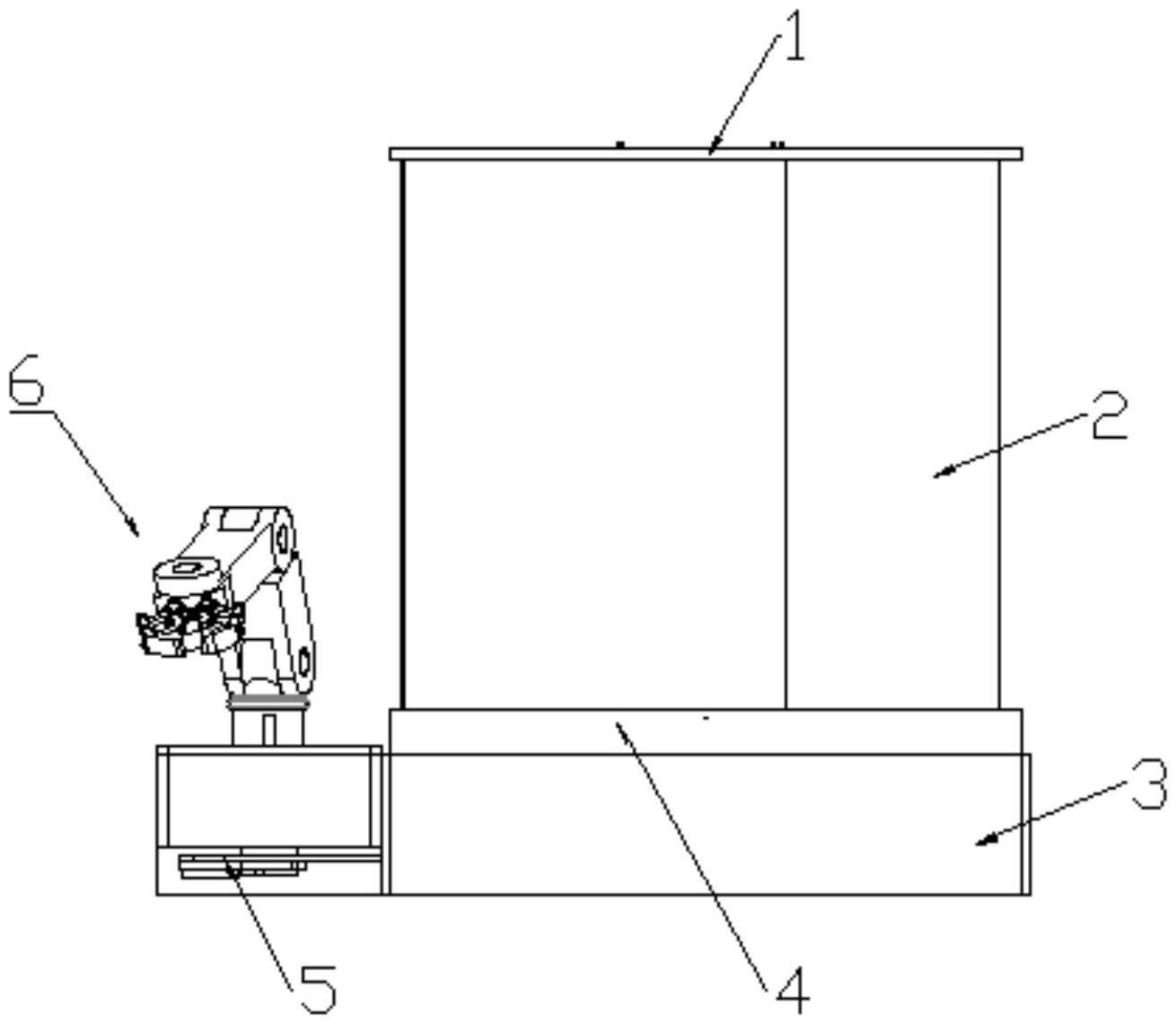
2、为实现上述目的,本实用新型提供如下技术方案:一种用于机器视觉检测的高自由度强联动性轴承成像装置,包括支撑基座,所述支撑基座上安装有工作台,所述工作台的上部设置有不透光的可移动外层防护罩,所述工作台中设置相机支架,所述支撑基座的一侧设有工业机器人,所述工业机器人通过棘轮转向机构进行控制转向。
3、优选的,所述可移动外层防护罩的顶部设置顶盖,所述相机支架安装在顶盖的下方。
4、优选的,所述相机支架包括连接支架,所述连接支架安装在顶盖上,所述连接支架上转动安装摆动长连杆,所述摆动长连杆的末端安装转动支撑架,转动支撑架上安装相机云台。
5、优选的,所述工业机器人包括座箱,座箱上安装机器人转动轴,所述机器人转动轴上转动连接单向连杆,所述单向连杆转动连接交错轴连杆,所述交错轴连杆上转动连接机械爪底座,所述机械爪底座上安装机械爪,机器人转动轴、单向连杆、交错轴连杆和机械爪底座组成的机械臂可实现机械爪的全方位移动。
6、优选的,所述棘轮转向机构包括可绕底座进行转动的棘轮转动杆,所述棘轮安装在棘轮转动杆上的转动端,所述棘轮上安装在配合防止其回转的止回棘爪和棘爪,所述棘轮转动杆的另一侧转动端转动连接连杆,所述连杆的另一端转动连接转动杆,所述转动杆的另一端转动安装在底座上,并通过电机进行转动。
7、与现有技术相比,本实用新型的有益效果是:
8、本实用新型通过棘轮转向机构与工业机器人的联动,使得工作台与工业机器人每次分拣时转过相同角度,内部相机可对轴承实时成像并通过相应算法检测轴承的缺陷,及时发出信号引导工业机器人拣去不良品,更好的适应流水线生产。
9、通过可移动外层防护罩的设置,可移动外部防护罩的外部采用黑色漆面不透光,其内表面采用磨砂处理,减少外部环境光以及内部反射光的影响,从而减少环境光对内部检测获取图像质量的影响。
技术特征:
1.一种用于机器视觉检测的高自由度强联动性轴承成像装置,其特征在于:包括支撑基座(3),所述支撑基座(3)上安装有工作台(4),所述工作台(4)的上部设置有不透光的可移动外层防护罩(2),所述工作台(4)中设置相机支架(7),所述支撑基座(3)的一侧设有工业机器人(6),所述工业机器人(6)通过棘轮转向机构(5)进行控制转向。
2.根据权利要求1所述的一种用于机器视觉检测的高自由度强联动性轴承成像装置,其特征在于:所述可移动外层防护罩(2)的顶部设置顶盖(1),所述相机支架(7)安装在顶盖(1)的下方。
3.根据权利要求1所述的一种用于机器视觉检测的高自由度强联动性轴承成像装置,其特征在于:所述相机支架(7)包括连接支架(7-5),所述连接支架(7-5)安装在顶盖(1)上,所述连接支架(7-5)上转动安装摆动长连杆(7-4),所述摆动长连杆(7-4)的末端安装转动支撑架(7-3),转动支撑架(7-3)上安装相机云台(7-2)。
4.根据权利要求1所述的一种用于机器视觉检测的高自由度强联动性轴承成像装置,其特征在于:所述工业机器人(6)包括座箱(6-7),座箱(6-7)上安装机器人转动轴(6-9),所述机器人转动轴(6-9)上转动连接单向连杆(6-1),所述单向连杆(6-1)转动连接交错轴连杆(6-2),所述交错轴连杆(6-2)上转动连接机械爪底座(6-3),所述机械爪底座(6-3)上安装机械爪(6-5),机器人转动轴(6-9)、单向连杆(6-1)、交错轴连杆(6-2)和机械爪底座(6-3)组成的机械臂可实现机械爪(6-5)的全方位移动。
5.根据权利要求1所述的一种用于机器视觉检测的高自由度强联动性轴承成像装置,其特征在于:所述棘轮转向机构(5)包括可绕底座进行转动的棘轮转动杆(5-3),所述棘轮(5-5)安装在棘轮转动杆(5-3)上的转动端,所述棘轮(5-5)上安装在配合防止其回转的止回棘爪(5-6)和棘爪(5-4),所述棘轮转动杆(5-3)的另一侧转动端转动连接连杆(5-2),所述连杆(5-2)的另一端转动连接转动杆(5-1),所述转动杆(5-1)的另一端转动安装在底座上,并通过电机进行转动。
技术总结
本技术公开了检测设备技术领域的一种用于机器视觉检测的高自由度强联动性轴承成像装置,包括支撑基座,所述支撑基座上安装有工作台,所述工作台的上部设置有不透光的可移动外层防护罩,所述工作台中设置相机支架,所述支撑基座的一侧设有工业机器人,所述工业机器人通过棘轮转向机构进行控制转向,本技术通过棘轮转向机构与工业机器人的联动,使得工作台与工业机器人每次分拣时转过相同角度,内部相机可对轴承实时成像并通过相应算法检测轴承的缺陷,及时发出信号引导工业机器人拣去不良品,更好的适应流水线生产。
技术研发人员:林子翔,张贵阳,鲁明丽,臧书琪,吉思雨,徐天任
受保护的技术使用者:常熟理工学院
技术研发日:20230131
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!