一种激光雷达系统、车辆以及机器人的制作方法
本技术涉及导航领域,尤其涉及一种激光雷达系统、车辆以及机器人。
背景技术:
1、随着测量技术水平的日益发展,激光雷达的应用也越来越广泛,其中激光雷达的测量准确度也备受关注,随着激光雷达的长时间使用,由于环境外力影响或者激光雷达自身器件的损耗,激光雷达可能会在测量时产生噪点数据,而该噪点数据会影响测量数据的正确性,造成机器人路径规划错误或障碍识别异常,因而需要定期对激光雷达的测量状态进行分析评估,避免因过多噪点数据引起测量的严重失真,影响用户的正常使用。
技术实现思路
1、基于此,为了解决上述问题,本实用新型提供了一种激光雷达系统、车辆以及机器人。通过设置反射挡板以及光源装置模拟实际环境,并对激光雷达的噪点数据进行统计确认,实现噪点检测,并输出检测结果,便于用户掌握激光雷达的运行状态。
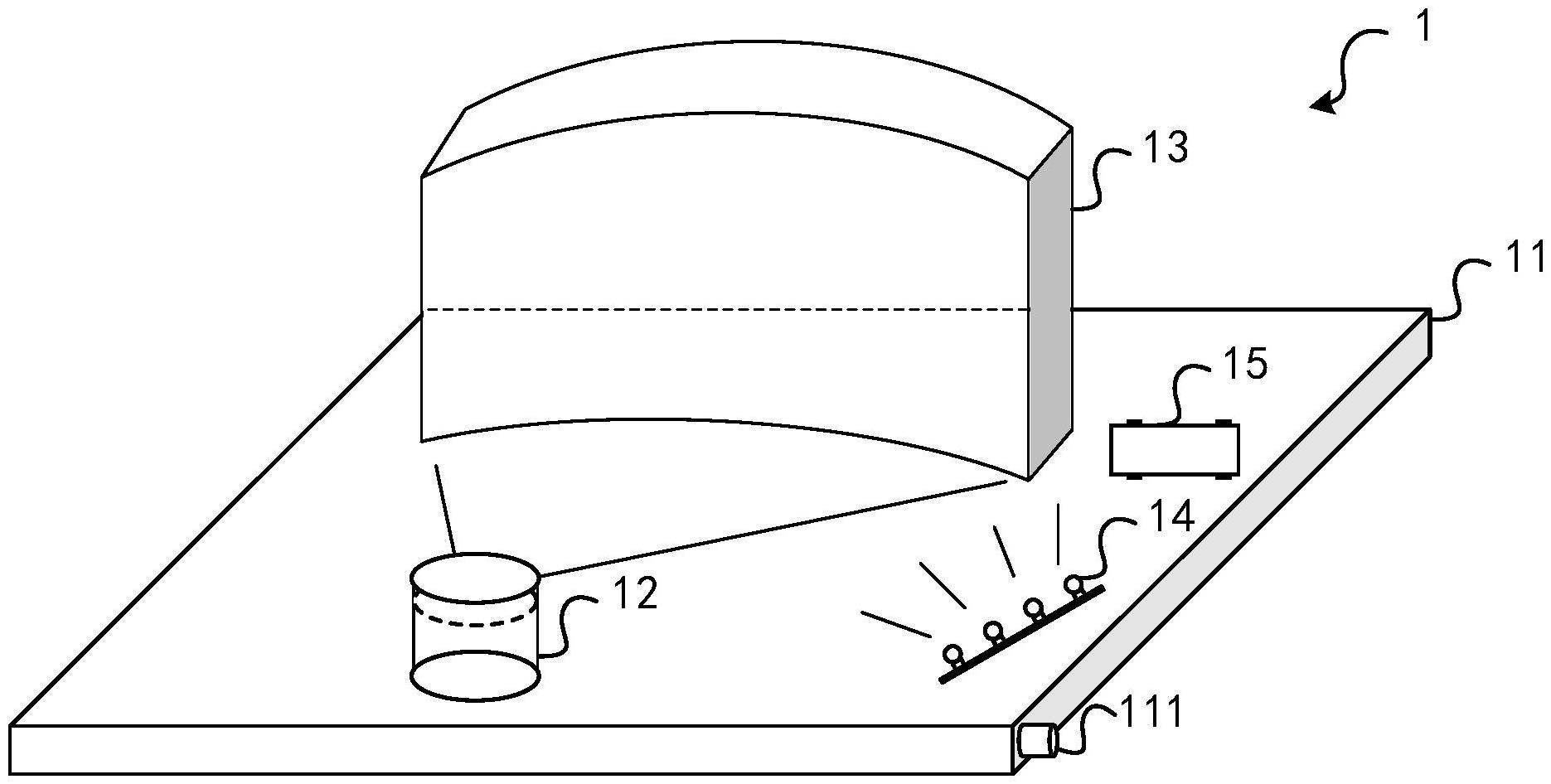
2、第一方面,本实用新型实施例提供了一种激光雷达系统,包括底盘、激光雷达、反射挡板、光源装置以及处理器模块;所述激光雷达、反射挡板、光源装置以及处理器模块均安装于所述底盘,其中所述底盘设置有供电装置,所述供电装置用于接收电源电能,并为所述激光雷达、所述光源装置以及所述处理器模块供电;所述激光雷达设置在与所述反射挡板内侧相距第一距离阈值的位置,所述光源装置设置在与所述反射挡板内侧相距第二距离阈值的位置,所述反射挡板的遮挡面积大小至少大于等于激光雷达的扫描面积;所述激光雷达的输出端与所述处理器模块的点云数据输入端连接,所述激光雷达的输入端与所述处理器模块的第一控制输出端连接,所述激光雷达用于探测与测距,并生成点云数据;所述光源装置的输入端与所述处理器模块的第二控制输出端连接,所述光源装置用于发出预设强度的亮光;所述处理器模块用于控制光源装置的发光,以及根据激光雷达的测量数据输出激光雷达的噪点检测结果。
3、优选的,所述反射挡板围成的空间形状为圆弧形、半圆弧形或者多边形。
4、优选的,所述光源装置还设置有强度切换按钮,所述强度切换按钮用于切换发出亮光的强度。
5、优选的,还包括充电电源模块,所述充电电源模块安装于所述底盘,所述充电电源模块的电源输出端与所述供电装置的电源输入端连接。
6、优选的,还包括旋转装置,所述旋转装置安装于所述底盘,所述激光雷达设置于所述旋转装置上,所述旋转装置的输入端与所述处理器模块的第三控制输出端连接。
7、优选的,还包括无线通信模块,所述无线通信模块安装于所述底盘,所述无线通信模块的输入端与所述处理器模块的无线数据输出端连接,所述无线通信模块的输出端与所述处理器模块的无线数据输入端连接。
8、优选的,还包括声光控制模块,所述声光控制模块安装于所述底盘,所述声光控制模块的输入端与所述处理器模块的声光数据输出端连接,所述声光控制模块用于输出报警声信号或报警光信号。
9、优选的,还包括显示屏装置,所述显示屏装置安装于所述底盘,所述显示屏装置的输入端与所述处理器模块的显示数据输出端连接,所述显示屏装置用于显示当前光源强度,以及噪点数据统计情况。
10、第二方面,本实用新型实施例提供了一种车辆,包括车载中控模块,车载供电模块,以及设置有本实用新型任一实施例所述的激光雷达系统,所述处理器模块的数据输出端与所述车载中控模块的数据输入端连接,所述处理器模块的控制输入端与所述车载中控模块的控制输出端连接,所述车载供电模块的输出端与所述供电装置的供电输入端连接。
11、第三方面,本实用新型实施例提供了一种机器人,包括中央控制模块,供电模块,以及设置有本实用新型任一实施例所述的激光雷达系统,所述处理器模块的数据输出端与所述中央控制模块的数据输入端连接,所述处理器模块的控制输入端与所述中央控制模块的控制输出端连接,所述供电模块的输出端与所述供电装置的供电输入端连接。
12、本实用新型实施例中激光雷达系统包括底盘、激光雷达、反射挡板、光源装置以及处理器模块;激光雷达、反射挡板、光源装置以及处理器模块均安装于底盘,其中底盘设置有供电装置,供电装置用于接收电源电能,并为激光雷达、光源装置以及处理器模块供电;激光雷达设置在与反射挡板内侧相距第一距离阈值的位置,光源装置设置在与反射挡板内侧相距第二距离阈值的位置,反射挡板的遮挡面积大小至少大于等于激光雷达的扫描面积;激光雷达的输出端与处理器模块的点云数据输入端连接,激光雷达的输入端与处理器模块的第一控制输出端连接,激光雷达用于探测与测距,并生成点云数据;光源装置的输入端与处理器模块的第二控制输出端连接,光源装置用于发出预设强度的亮光;处理器模块用于控制光源装置的发光,以及根据激光雷达的测量数据输出激光雷达的噪点检测结果。上述,通过设置反射挡板以及光源装置模拟实际环境,并对激光雷达的噪点数据进行统计确认,实现噪点检测,并输出检测结果,便于用户掌握激光雷达的运行状态。
技术特征:
1.一种激光雷达系统,其特征在于,包括底盘(11)、激光雷达(12)、反射挡板(13)、光源装置(14)以及处理器模块(15);
2.根据权利要求1所述的激光雷达系统,其特征在于,所述反射挡板(13)围成的空间形状为圆弧形、半圆弧形或者多边形。
3.根据权利要求1所述的激光雷达系统,其特征在于,所述光源装置(14)还设置有强度切换按钮(141),所述强度切换按钮(141)用于切换发出亮光的强度。
4.根据权利要求1所述的激光雷达系统,其特征在于,还包括充电电源模块(16),所述充电电源模块(16)安装于所述底盘(11),所述充电电源模块(16)的电源输出端与所述供电装置(111)的电源输入端连接。
5.根据权利要求1所述的激光雷达系统,其特征在于,还包括旋转装置(17),所述旋转装置(17)安装于所述底盘(11),所述激光雷达(12)设置于所述旋转装置(17)上,所述旋转装置(17)的输入端与所述处理器模块(15)的第三控制输出端连接。
6.根据权利要求1所述的激光雷达系统,其特征在于,还包括无线通信模块(18),所述无线通信模块(18)安装于所述底盘(11),所述无线通信模块(18)的输入端与所述处理器模块(15)的无线数据输出端连接,所述无线通信模块(18)的输出端与所述处理器模块(15)的无线数据输入端连接。
7.根据权利要求1所述的激光雷达系统,其特征在于,还包括声光控制模块(19),所述声光控制模块(19)安装于所述底盘(11),所述声光控制模块(19)的输入端与所述处理器模块(15)的声光数据输出端连接,所述声光控制模块(19)用于输出报警声信号或报警光信号。
8.根据权利要求1所述的激光雷达系统,其特征在于,还包括显示屏装置(20),所述显示屏装置(20)安装于所述底盘(11),所述显示屏装置(20)的输入端与所述处理器模块(15)的显示数据输出端连接,所述显示屏装置(20)用于显示当前光源强度,以及噪点数据统计情况。
9.一种车辆,其特征在于,包括车载中控模块(31),车载供电模块(32),以及设置有权利要求1至8任一项所述的激光雷达系统,所述处理器模块(15)的数据输出端与所述车载中控模块(31)的数据输入端连接,所述处理器模块(15)的控制输入端与所述车载中控模块(31)的控制输出端连接,所述车载供电模块(42)的输出端与所述供电装置(111)的供电输入端连接。
10.一种机器人,其特征在于,包括中央控制模块(41),供电模块(42),以及设置有权利要求1至8任一项所述的激光雷达系统,所述处理器模块(15)的数据输出端与所述中央控制模块(41)的数据输入端连接,所述处理器模块(15)的控制输入端与所述中央控制模块(41)的控制输出端连接,所述供电模块(42)的输出端与所述供电装置(111)的供电输入端连接。
技术总结
本技术公开了一种激光雷达系统、车辆以及机器人。该激光雷达系统的激光雷达设置在与反射挡板内侧相距第一距离阈值的位置,光源装置设置在与反射挡板内侧相距第二距离阈值的位置;激光雷达的输出端与处理器模块的点云数据输入端连接,激光雷达的输入端与处理器模块的第一控制输出端连接,激光雷达用于探测与测距,并生成点云数据;光源装置用于发出预设强度的亮光;处理器模块用于控制光源装置的发光,以及根据激光雷达的测量数据输出激光雷达的噪点检测结果。上述,通过设置反射挡板以及光源装置模拟实际环境,并对激光雷达的噪点数据进行统计确认,实现噪点检测,并输出检测结果,便于用户掌握激光雷达的运行状态。
技术研发人员:郭东贵,袁海山,王品,何英,吕星宏
受保护的技术使用者:深圳越登智能技术有限公司
技术研发日:20230112
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!