一种起重机定位装置的制作方法
本技术涉及起重机检测,尤其是涉及一种起重机定位装置。
背景技术:
1、原有的起重机司机实际操作技能考试主要采用传统的人工评分、人工记录的方式实施,评分主要依赖于考评员的直观记录和主观判断,这就不可避免的带入的一些主观因素,影响评分的客观性,如:精准判定吊物运行路线需考评员同时从多角度来观察,但实际上实现较为困难;而考评员的注意力分散、对高度的粗略估计等也可能影响评分的客观程度。故采用智能化自动评分系统可以从根本上消除人员主观因素的影响,进一步提高考试过程的客观性、公正性。此外,还可以防止人员主观故意破坏考试公正性的行为。
2、起重机司机实际操作技能考试过程中,考生是否按照规定的行驶路线完成各项操作是考试最基本的过程,智能化的自动评判考试系统对此过程的评判依赖于准确的位置数据,找到一种可靠、高效的手段进行起重机小车定位及评判系统,对于保证考试自动评判的质量至关重要。
技术实现思路
1、本实用新型的目的就是为了克服上述现有技术存在起重机按照预定行驶路线完成各项操作是考试最基本的过程,依赖于考评员的直观记录和主观判断,存在客观性和准确度低的缺陷而提供一种起重机定位装置。
2、本实用新型的目的可以通过以下技术方案来实现:
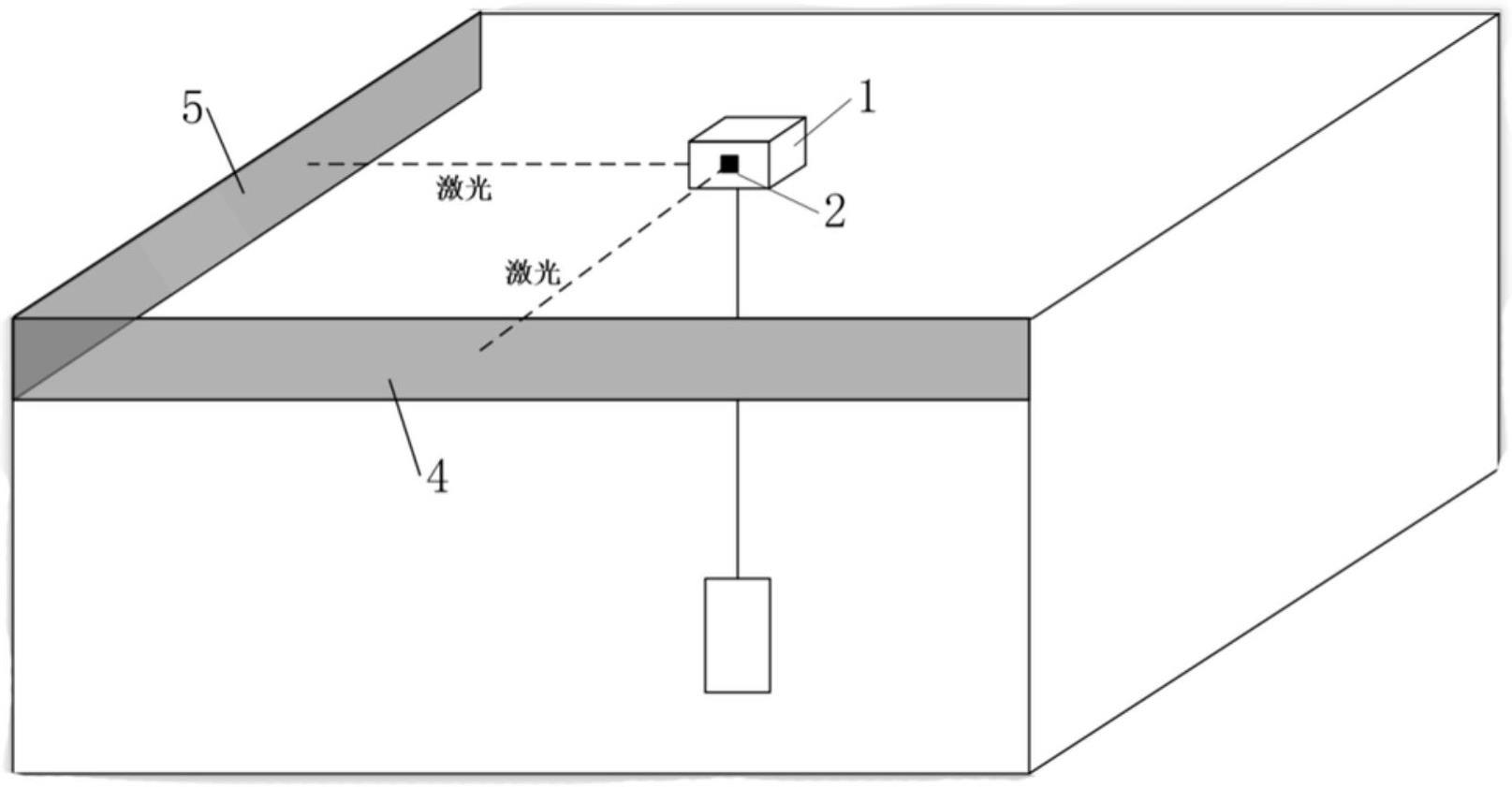
3、一种起重机定位装置,包括起重机本体、第一传感器、第二传感器、第一标定板和第二标定板;
4、所述第一传感器固定在起重机本体的第一侧面上,所述第二传感器固定在起重机本体的第二侧面上,所述第一侧面垂直于第二侧面,所述第一传感器和第二传感器均连接数据采集模块,所述第一标定板垂直连接第二标定板,所述第一标定板和第二标定板设置在起重机本体预设移动区域的边界位置;所述第一标定板和第一传感器对应,所述第二标定板与第二传感器对应。
5、优选地,所述第一传感器为激光测距传感器,所述第一标定板为反光板。
6、优选地,所述第一传感器与第一标定板位于同一水平高度。
7、优选地,所述第一标定板平行于第一侧面。
8、优选地,所述第一传感器发射的激光垂直于第一标定板。
9、优选地,所述第二传感器为激光测距传感器,所述第二标定板为反光板。
10、优选地,所述第二传感器与第二标定板位于同一水平高度。
11、优选地,所述第二标定板平行于第二侧面。
12、优选地,所述第二传感器发射的激光垂直于第二标定板。
13、优选地,所述第一标定板的板面正对第一传感器,所述第二标定板的板面正对第二传感器。
14、与现有技术相比,本实用新型具有以下优点:
15、(1)本方案利用相互垂直连接的第一标定板和第二标定板,并将第一标定板和第二标定板设置在起重机本体预设移动区域的边界位置,为起重机本体的移动范围建立了坐标系;利用固定在起重机本体上的第一传感器和第二传感器,测量起重机本体与第一标定板和第二标定板的距离,将采集的数据传输至数据采集模块,得到起重机本体的坐标,即起重机本体的空间位置。通过坐标系中对起重机本体进行准确定位,以反映起重机本体的实时位置和整体的移动路径,同时整个流程中减少人员参与,检测的结果更具客观性。
16、(2)本方案中采用激光测距传感器和反光板进行起重机本体的位置检测,以反光板构建坐标系,以激光测距传感器测量起重机本体于坐标系中的实时位置,激光测距传感器能够更快地反馈起重机本体的实时位置,提高了测量起重机本体移动路径的准确性。
技术特征:
1.一种起重机定位装置,包括起重机本体(1),其特征在于,所述装置还包括第一传感器(2)、第二传感器(3)、第一标定板(4)和第二标定板(5);
2.根据权利要求1所述的一种起重机定位装置,其特征在于,所述第一传感器(2)为激光测距传感器,所述第一标定板(4)为反光板。
3.根据权利要求2所述的一种起重机定位装置,其特征在于,所述第一传感器(2)与第一标定板(4)位于同一水平高度。
4.根据权利要求2所述的一种起重机定位装置,其特征在于,所述第一标定板(4)平行于第一侧面。
5.根据权利要求2所述的一种起重机定位装置,其特征在于,所述第一传感器(2)发射的激光垂直于第一标定板(4)。
6.根据权利要求1所述的一种起重机定位装置,其特征在于,所述第二传感器(3)为激光测距传感器,所述第二标定板(5)为反光板。
7.根据权利要求6所述的一种起重机定位装置,其特征在于,所述第二传感器(3)与第二标定板(5)位于同一水平高度。
8.根据权利要求6所述的一种起重机定位装置,其特征在于,所述第二标定板(5)平行于第二侧面。
9.根据权利要求6所述的一种起重机定位装置,其特征在于,所述第二传感器(3)发射的激光垂直于第二标定板(5)。
10.根据权利要求1所述的一种起重机定位装置,其特征在于,所述第一标定板(4)的板面正对第一传感器(2),所述第二标定板(5)的板面正对第二传感器(3)。
技术总结
本技术涉及一种起重机定位装置,包括起重机本体、第一传感器、第二传感器、第一标定板和第二标定板;所述第一传感器固定在起重机本体的第一侧面上,所述第二传感器固定在起重机本体的第二侧面上,所述第一侧面垂直于第二侧面,所述第一传感器和第二传感器均连接数据采集模块,所述第一标定板垂直连接第二标定板,所述第一标定板和第二标定板设置在起重机本体预设移动区域的边界位置,所述第一标定板和第一传感器对应,所述第二标定板与第二传感器对应。与现有技术相比,本技术具有准确度高等优点。
技术研发人员:许兆宇
受保护的技术使用者:上海市特种设备监督检验技术研究院
技术研发日:20230329
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!