三维显示装置的深度感测量装置的制作方法
本技术涉及一种针对三维对象的深度感测量装置及方法。
背景技术:
1、眼镜方式和无眼镜方式作为实现三维图像的方式而被广泛商用化并使用。眼镜方式有偏振眼镜方式和快门眼镜方式,无眼镜方式有透镜方式和视差屏障方式。这些方式利用两眼的双眼视差(binocular parallax)来观看三维图像。以向观看者传输三维图像为目的的三维图像实现方式需要向观看者传输与在自然环境中遇到的3d体验无法区分的程度的真实的3d体验。
2、在实际自然3d环境中遇到的3d对象被感知为与观察距离、观察视点、观察环境无关地具有相同的3d深度和3d形状。相反,通过三维显示装置感知的3d对象根据观察距离、观察视点及观察环境而被感知系统地失真的3d深度感和3d形状感。
技术实现思路
1、本实用新型所要解决的技术问题在于提供一种测量装置及方法,该测量装置及方法为了实现诱发与从自然3d环境中接触的对象获得的感知感相同的感知感的3d真实感图像,客观地对由当前的三维显示装置诱发的三维深度感和形状感的感知失真进行数值化并测量。
2、本实用新型的技术问题并不限于以上提及的技术问题,本领域技术人员可以通过以下记载明确理解未提及的其他技术问题。
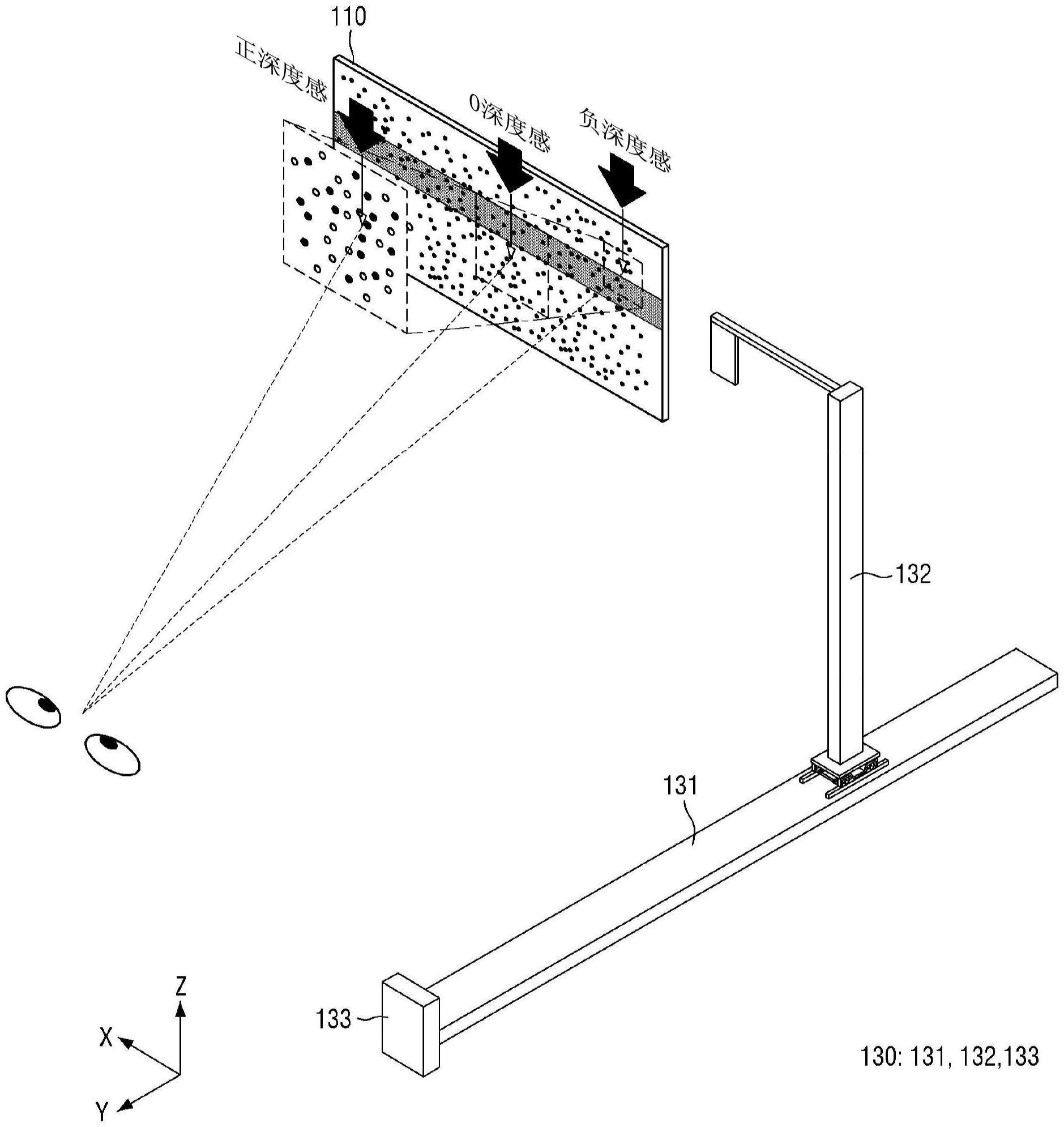
3、用于解决上述技术问题的一实施例的三维显示装置的深度感测量装置可以包括:控制部,用于调整三维图案的参数来生成三维对象;三维显示部,用于以预先设定的深度感显示所述三维对象;输入部,用于借由受试者的操作来生成输入信号;轨道,用于向所述三维显示部的前方及后方延伸;移动体,能够在所述轨道上移动;以及距离传感器,用于测量与所述移动体的距离。
4、在一实施例中,所述参数可以是大小及空间频率中的一个以上。
5、在一实施例中,所述三维图案可以是随机点、伪随机点、文字中的一个。
6、在一实施例中,所述移动体可以沿所述轨道向射出三维显示部的图像显示光的方向前进或向所述图像显示光的射出方向的反方向后退。
7、在一实施例中,所述移动体可以在输入所述输入信号的时间点停止移动。
8、在一实施例中,所述移动体可以包括:行驶主体;一对以上的轮子,布置在所述轨道上;驱动部,连接到所述轮子而提供旋转驱动力,以使所述轮子行驶;支撑部,沿所述行驶主体的第一方向延伸;以及指示器,从所述支撑部沿第二方向延伸。
9、在一实施例中,所述距离传感器可以布置于所述轨道的一端。
10、在一实施例中,所述距离传感器可以是红外线距离传感器、超声波传感器、激光距离传感器中的一个。
11、在一实施例中,所述三维显示部可以包括:显示面板,包含多个像素;以及光学层,布置在所述显示面板的光输出方向上。
12、另一实施例的三维显示装置的深度感测量装置,包括:控制部,用于调整三维图案的参数来生成三维对象;三维显示部,用于以预先设定的深度感显示所述三维对象;输入部,用于借由受试者的操作来生成输入信号;轨道,用于向所述三维显示部的前方及后方延伸;移动体,能够在所述轨道上移动;以及距离传感器,用于测量与所述移动体的距离,其中,所述输入部在所述移动体位于与被所述受试者感知的所述三维对象的深度感对应的位置的时间点生成输入信号。
13、另一实施例的三维显示装置的深度感测量方法可以包括如下步骤:控制部调整三维图案的大小或空间频率中的一个以上来生成三维对象;显示部显示所生成的三维对象;移动体在轨道的一端向显示部方向移动;输入部根据受试者的操作来生成输入信号;所述移动体在所述输入信号的生成时间点停止移动;以及距离测量部测量从距离传感器到停止移动的移动体的距离。
14、其他实施例的具体事项包括在详细说明及附图中。
15、通过根据实施例的显示装置,可以测量3d图像的深度感知失真的程度及形状感知失真的程度。
16、根据实施例的效果不受以上例示的内容的限制,在本说明书中包括更加多样的效果。
技术特征:
1.一种三维显示装置的深度感测量装置,其特征在于,包括:
2.根据权利要求1所述的三维显示装置的深度感测量装置,其特征在于,
3.根据权利要求1所述的三维显示装置的深度感测量装置,其特征在于,
4.根据权利要求1所述的三维显示装置的深度感测量装置,其特征在于,
5.根据权利要求4所述的三维显示装置的深度感测量装置,其特征在于,
6.根据权利要求5所述的三维显示装置的深度感测量装置,其特征在于,
7.根据权利要求1所述的三维显示装置的深度感测量装置,其特征在于,
8.根据权利要求1所述的三维显示装置的深度感测量装置,其特征在于,
9.根据权利要求1所述的三维显示装置的深度感测量装置,其特征在于,
10.一种三维显示装置的深度感测量装置,其特征在于,包括:
技术总结
本技术涉及一种三维显示装置的深度感测量装置,三维显示装置的深度感测量装置可以包括:控制部,用于调整三维图案的参数来生成三维对象;三维显示部,用于以预先设定的深度感显示所述三维对象;输入部,用于借由受试者的操作来生成输入信号;轨道,用于向所述三维显示部的前方及后方延伸;移动体,能够在所述轨道上移动;以及距离传感器,用于测量与所述移动体的距离。
技术研发人员:河英相,李朱炯,朱星俊,金范植,金泳灿
受保护的技术使用者:三星显示有限公司
技术研发日:20230412
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!