一种扦样杆及扦样机器人的制作方法
本技术涉及粮食质量检测,特别涉及一种扦样杆及扦样机器人。
背景技术:
1、食收购站收购外来的粮食时,为确保粮食的收购品质,在粮食入库之前,需要对货车车厢内的粮食进行取样,取样包括是为了检测粮食的灰尘含量以及含水量,从而确定能此批粮食的品质,这也是粮食收购站在收购粮食之前必做的检测事项;例如检测粮食的温度、湿度、是否有发霉和发芽等。
2、现有技术中,扦样杆一般设置于可以移动的机器人上,由机器人带动扦样杆进行移动,对车厢内多个位置的粮食进行扦样。
3、由于运粮卡车大小不同,堆放粮食的高度也不一样,为了满足普适性的要求,扦样杆通常均具有较长的长度,运行时,由于扦样杆为空心结构,末端的抖动非常大,晃动弧度较大,因而可能会造成样品掉落等问题,导致扦样效率较低。
技术实现思路
1、本实用新型的主要目的是提供一种扦样杆及扦样机器人,旨在解决现有技术中扦样杆由于长度较长在扦样过程中易发生晃动的技术问题。
2、为实现上述目的,第一方面,本实用新型实施例提供了一种扦样杆,包括:
3、杆体,所述杆体为中空结构,具有第一端与第二端,所述杆体靠近所述第一端的侧壁开设有取样口,所述杆体的第二端用于与外部装置连接;
4、滑环,套设于所述杆体上,所述滑环被配置为可沿所述杆体的长度方向在所述杆体上滑动;
5、限位结构,设置于所述杆体上,位于所述第一端与所述第二端之间,所述限位结构被配置为用于限制所述滑环的滑动位于所述限位结构与所述第二端之间;
6、阻尼环,套设于所述杆体上,所述阻尼环的内环壁与所述杆体的侧壁之间具有预设间距,所述阻尼环位于所述滑环与所述第一端之间,所述阻尼环与所述滑环之间连接有多个连接件,多个所述连接件沿所述滑环的周向等距间隔设置。
7、在本实用新型的部分实施例中,所述限位结构为限位环,所述限位环与所述杆体固定连接,所述限位环的外径大于所述滑环的内径。
8、在本实用新型的部分实施例中,所述连接件为柔性连接件;或
9、所述连接件为刚性连接件。
10、在本实用新型的部分实施例中,所述柔性连接件为柔性钢丝绳。
11、在本实用新型的部分实施例中,所述滑环上设置有与所述连接件数量相匹配的第一连接孔,所述限位环上设置有与所述第一连接孔一一对应的第二连接孔,每个所述第一连接孔对应一个所述第二连接孔,所述第一连接孔和所述第二连接孔均为通孔,所述柔性钢丝绳的一端与所述第一连接孔连接,所述柔性钢丝绳的另一端与所述第二连接孔连接。
12、在本实用新型的部分实施例中,所述限位结构为多个间隔设置于所述杆体上的凸起,所述凸起用于限制所述滑环在所述杆体长度方向上的移动。
13、在本实用新型的部分实施例中,所述杆体的第一端设置有锥形导头。
14、在本实用新型的部分实施例中,所述杆体靠近所述第二端的侧壁上设置有吸气孔,所述吸气孔与杆体内部的中空腔连通。
15、在本实用新型的部分实施例中,所述第二端上设置有钢丝软管接头,所述钢丝软管接头用于与外部装置连接。
16、本实用新型的实施例还提供了一种扦样机器人,包括上述的扦样杆。
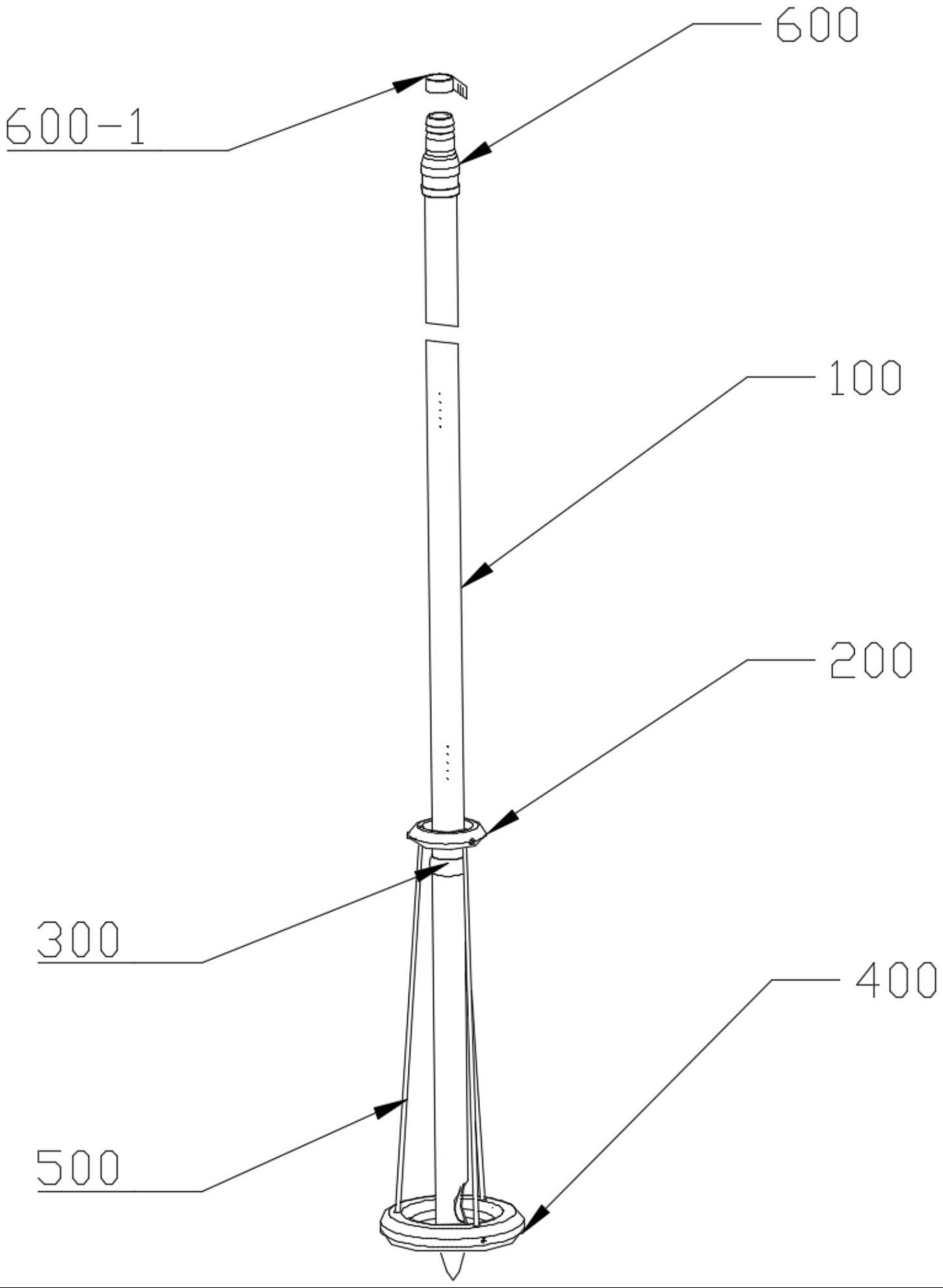
17、本实用新型提供了一种扦样杆及扦样机器人,该扦样杆主要包括杆体以及设置于杆体上的滑环和阻尼环,滑环套设于杆体上,滑环被配置为可沿杆体的长度方向在杆体上滑动,杆体的第一端和第二端之间设置有限位结构,限位结构用于限制滑环的滑动范围位于限位结构和第二端之间,阻尼环套设于杆体上,阻尼环的内环壁与杆体的侧壁之间具有预设间距,阻尼环和滑环通过连接件形成阻尼结构,当杆体摆动时,阻尼环相对杆体具有一定的动作延后,因此,阻尼环的内壁会撞击杆体,使杆体的摆动尽快平稳,提高扦样效率。
技术特征:
1.一种扦样杆,其特征在于,包括:
2.根据权利要求1所述的扦样杆,其特征在于,所述限位结构为限位环,所述限位环与所述杆体固定连接,所述限位环的外径大于所述滑环的内径。
3.根据权利要求2所述的扦样杆,其特征在于,所述连接件为柔性连接件;或
4.根据权利要求3所述的扦样杆,其特征在于,所述柔性连接件为柔性钢丝绳。
5.根据权利要求4所述的扦样杆,其特征在于,所述滑环上设置有与所述连接件数量相匹配的第一连接孔,所述限位环上设置有与所述第一连接孔一一对应的第二连接孔,每个所述第一连接孔对应一个所述第二连接孔,所述第一连接孔和所述第二连接孔均为通孔,所述柔性钢丝绳的一端与所述第一连接孔连接,所述柔性钢丝绳的另一端与所述第二连接孔连接。
6.根据权利要求1所述的扦样杆,其特征在于,所述限位结构为多个间隔设置于所述杆体上的凸起,所述凸起用于限制所述滑环在所述杆体长度方向上的移动。
7.根据权利要求1所述的扦样杆,其特征在于,所述杆体的第一端设置有锥形导头。
8.根据权利要求1所述的扦样杆,其特征在于,所述杆体靠近所述第二端的侧壁上设置有吸气孔,所述吸气孔与杆体内部的中空腔连通。
9.根据权利要求1所述的扦样杆,其特征在于,所述第二端上设置有钢丝软管接头,所述钢丝软管接头用于与外部装置连接。
10.一种扦样机器人,其特征在于,包括权利要求1-9任意一项所述的扦样杆。
技术总结
本技术公开了一种扦样杆及扦样机器人,所述扦样杆包括杆体、滑环、限位结构和阻尼环,所述滑环被配置为可沿所述杆体的长度方向在所述杆体上滑动;限位结构设置于所述杆体上,所述限位结构被配置为用于限制所述滑环的滑动位于所述限位结构与所述第二端之间;所述阻尼环套设于所述杆体上,所述阻尼环的内环壁与所述杆体的侧壁之间具有预设间距,所述阻尼环位于所述滑环与所述第一端之间,所述阻尼环与所述滑环之间连接有多个连接件,多个所述连接件沿所述滑环的周向等距间隔设置。阻尼环和滑环通过连接件形成阻尼结构,杆体摆动时,阻尼环相对杆体具有一定的动作延后,阻尼环的内壁会撞击杆体,使杆体的摆动尽快平稳,提高扦样效率。
技术研发人员:杨海斌,王思凤,周黔勇,徐纯科
受保护的技术使用者:成都卡诺普机器人技术股份有限公司
技术研发日:20230421
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!