测距传感器的制作方法
本技术涉及一种激光测距领域,具体涉及一种测距传感器。
背景技术:
1、目前,常使用激光测距传感器进行距离测量。不同的测距场景下,需要调节传感器的发射端和接收端之间的距离以实现不同的测量距离。现有的传感器的发射端和接收端之间的距离调节方式一般采用螺纹调节方式进行调节,然而,这种调节方式会存在距离调节不准确的问题。
技术实现思路
1、针对上述技术问题,本实用新型采用的技术方案为:
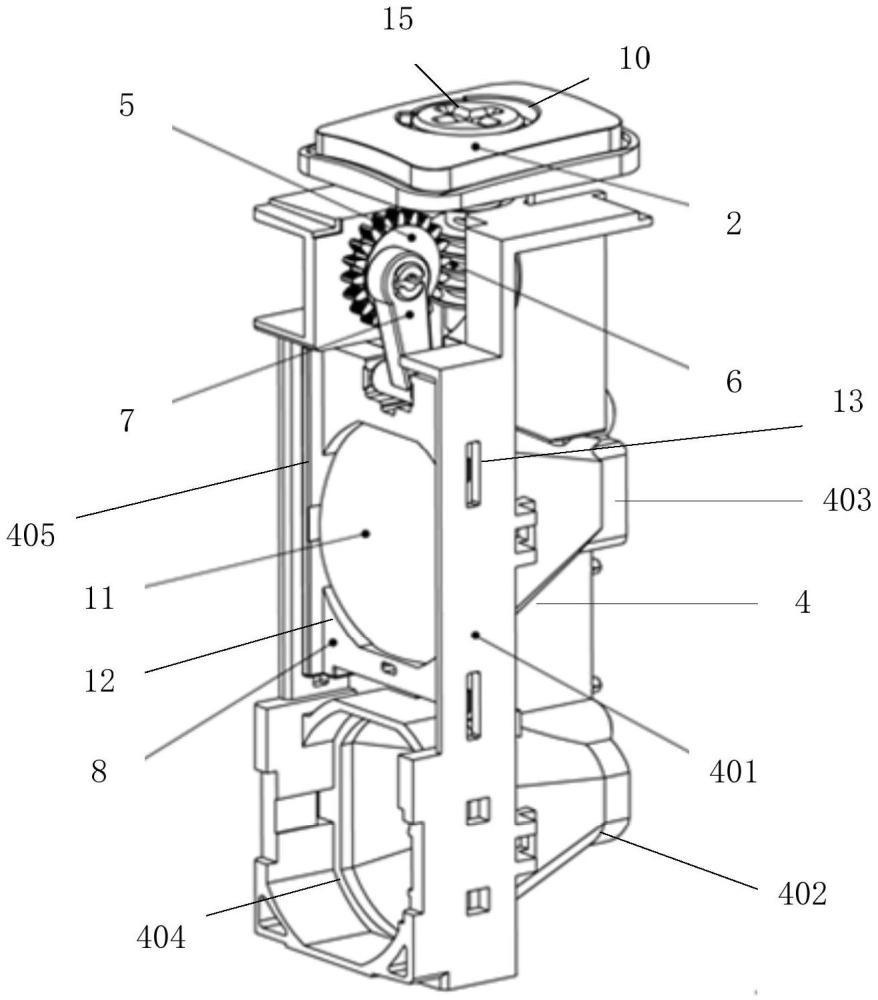
2、本实用新型实施例提供一种测距传感器,包括:壳体、顶板、固定板和驱动机构,所述固定板设置在所述壳体的内部,所述驱动机构包括支架、蜗轮、蜗杆、曲柄、滑动架和锁紧弹簧,所述顶板设置在所述壳体的顶部,形成有螺杆插入孔;所述支架固定设置在所述壳体的内部,所述支架包括支架主体以及与所述支架主体连接的发射端安装腔和接收端安装腔,所述支架主体上形成有第一安装孔和滑动开口,所述发射端安装腔的一端与所述固定板连接,另一端与所述第一安装孔连接,所述接收端安装腔的一端与所述固定板连接,另一端与所述支架主体连接,所述第一安装孔用于安装第一透镜;所述滑动架设置在所述滑动开口中并与所述支架主体滑动连接,所述滑动架上形成有用于安装第二透镜的第二安装孔;所述蜗杆通过所述螺杆插入孔插入设置在所述壳体中,所述螺杆的顶部形成有旋转槽;所述蜗轮可转动的设置在所述支架的上端,并与所述蜗杆啮合连接;所述曲柄的一端与所述蜗轮转动连接,另一端与所述滑动架转动连接;所述锁紧弹簧的一端与所述支架连接,另一端与所述滑动架连接,其中,通过旋转所述旋转槽,带动螺杆转动,进而通过蜗轮带动滑动架沿所述支架上下运动,所述锁紧弹簧用于确保所述滑动架平稳运动本实用新型至少具有以下有益效果:
3、本实用新型实施例提供的测距传感器,由于采用蜗轮蜗杆结构实现发射端和接收端之间的距离,并且通过锁紧弹簧保持发射端平稳运动,从而能够使得距离调节更加准确可靠,确保传感器的光学性能稳定。
技术特征:
1.一种测距传感器,其特征在于,包括:壳体、顶板、固定板和驱动机构,所述固定板设置在所述壳体的内部,所述驱动机构包括支架、蜗轮、蜗杆、曲柄、滑动架和锁紧弹簧,所述顶板设置在所述壳体的顶部,形成有螺杆插入孔;所述支架固定设置在所述壳体的内部,所述支架包括支架主体以及与所述支架主体连接的发射端安装腔和接收端安装腔,所述支架主体上形成有第一安装孔和滑动开口,所述发射端安装腔的一端与所述固定板连接,另一端与所述第一安装孔连接,所述接收端安装腔的一端与所述固定板连接,另一端与所述支架主体连接,所述第一安装孔用于安装第一透镜;所述滑动架设置在所述滑动开口中并与所述支架主体滑动连接,所述滑动架上形成有用于安装第二透镜的第二安装孔;所述蜗杆通过所述螺杆插入孔插入设置在所述壳体中,所述螺杆的顶部形成有旋转槽;所述蜗轮可转动的设置在所述支架的上端,并与所述蜗杆啮合连接;所述曲柄的一端与所述蜗轮转动连接,另一端与所述滑动架转动连接;所述锁紧弹簧的一端与所述支架连接,另一端与所述滑动架连接,其中,通过旋转所述旋转槽,带动螺杆转动,进而通过蜗轮带动滑动架沿所述支架上下运动,所述锁紧弹簧用于确保所述滑动架平稳运动。
2.根据权利要求1所述的测距传感器,其特征在于,所述蜗杆的导程角小于啮合轮齿间的当量摩擦角。
3.根据权利要求1所述的测距传感器,其特征在于,所述支架主体的两侧分别形成有沿支架主体的高度方向间隔设置的m个滑动槽,所述滑动架的两侧分别形成有沿滑动架的高度方向间隔设置的与m个滑动槽相配合的m个凸起,m>1。
4.根据权利要求3所述的测距传感器,其特征在于,m=2。
5.根据权利要求1所述的测距传感器,其特征在于,所述滑动架的底侧形成有弹簧插入孔,所述发射端安装腔上设置有弹簧安装块,所述弹簧安装块上形成有弹簧卡接槽。
6.根据权利要求5所述的测距传感器,其特征在于,所述锁紧弹簧为扭簧,所述扭簧的一端卡接在所述弹簧卡接槽中,另一端插入所述弹簧插入孔中并与所述滑动架相抵接。
技术总结
本技术提供了一种测距传感器,包括:壳体、顶板、固定板、支架、蜗轮、蜗杆、曲柄、滑动架和锁紧弹簧,顶板设置在壳体的顶部;支架固定设置在壳体的内部,包括支架主体以及与支架主体连接的发射端安装腔和接收端安装腔,支架主体上形成有第一安装孔和滑动开口,发射端安装腔设置在固定板和第一安装孔之间,接收端安装腔设置在固定板和主体连接;滑动架与支架主体滑动连接,形成有用于安装第二透镜的第二安装孔;蜗杆插入设置在壳体中,螺杆的顶部形成有旋转槽;蜗轮可转动的设置在支架的上端;曲柄的一端与蜗轮转动连接,另一端与滑动架转动连接;锁紧弹簧的一端与支架连接,另一端与滑动架连接。本技术能够确保调节高度精准调节。
技术研发人员:张乐,冀明明
受保护的技术使用者:天津宜科自动化股份有限公司
技术研发日:20230424
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!