一种激光雷达及其转镜结构
本技术涉及激光雷达,具体为一种激光雷达及其转镜结构。
背景技术:
1、激光雷达是一种感知周围信息的重要传感器,在进行周围环境探测时,在一种方式中,可以利用转镜反射激光对待探测空间进行探测,并接收待探测空间反射的扫描激光,进行处理后,就可以得到周围环境信息。
2、现有的激光雷达在安装后,其灵活性较弱,导致探测的区域较为有限,虽然市面上的一些激光雷达可以360°转动,但是其缺乏转后的自锁性,因此需要研发一种激光雷达及其转镜结构。
技术实现思路
1、本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
3、一种转镜结构,其包括:
4、安装架,所述安装架的底壁通过轴承一转动设置有垂直的转杆,所述转杆的顶端延伸转动位于安装架内腔且设置有蜗轮,所述安装架内腔通过轴承二转动设置有适配咬合蜗轮的蜗杆;
5、电动升降杆,所述转杆的底部设置有垂直的电动升降杆,所述电动升降杆的输出杆底端铰接转动设置有连接杆,所述连接杆的底端设置有安装板。
6、作为本实用新型所述的转镜结构的一种优选方案,其中:所述蜗杆的导程角小于蜗杆和蜗轮啮合轮齿间的当量摩擦角。
7、作为本实用新型所述的转镜结构的一种优选方案,其中:所述安装架内腔设置有驱动蜗杆转动的伺服电机,所述伺服电机的输出轴通过联轴器连接蜗杆的一端。
8、作为本实用新型所述的转镜结构的一种优选方案,其中:所述安装架的外侧壁对称设置有安装块,所述安装块开通有安装孔。
9、作为本实用新型所述的转镜结构的一种优选方案,其中:所述转杆呈水平面方向转动,所述连接杆呈竖直面方向转动。
10、作为本实用新型所述的激光雷达的一种优选方案,其中:安装板的底部安装用激光雷达本体。
11、与现有技术相比,本实用新型的有益效果是:
12、1.电动伸缩杆启动伸缩后,可调节激光雷达本体的角度;
13、2.而通过电动升降杆启动伸缩后,可调节激光雷达本体的高度,进一步全面的提高激光雷达本体探测的区域;
14、3.伺服电机带动蜗杆转动,从而带动蜗轮转动,蜗轮带动转杆、电动升降杆、安装板和激光雷达本体随之转动,从而实现激光雷达本体的360°探测,且蜗杆的导程角小于蜗杆和蜗轮啮合轮齿间的当量摩擦角,机构具有自锁性,可实现反向自锁,即只能蜗杆带动蜗轮,而不能由蜗轮带动蜗杆,使得从外部无法带动激光雷达本体转动。
技术特征:
1.一种转镜结构,其特征在于,包括:
2.根据权利要求1所述的转镜结构,其特征在于:所述蜗杆(150)的导程角小于蜗杆(150)和蜗轮(130)啮合轮齿间的当量摩擦角。
3.根据权利要求2所述的转镜结构,其特征在于:所述安装架(100)内腔设置有驱动蜗杆(150)转动的伺服电机(160),所述伺服电机(160)的输出轴通过联轴器连接蜗杆(150)的一端。
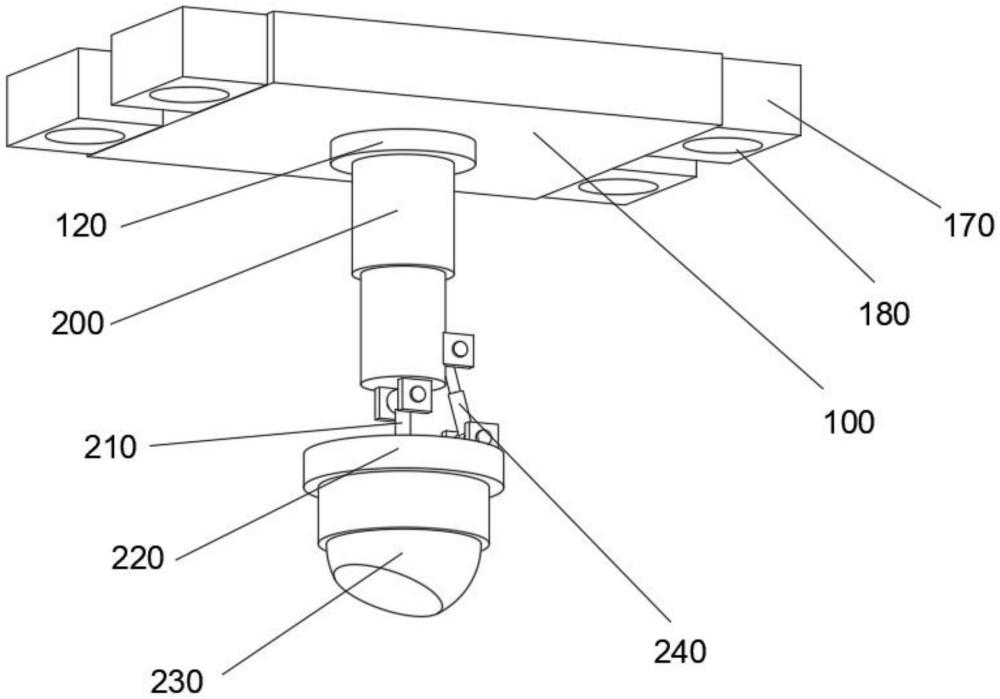
4.根据权利要求3所述的转镜结构,其特征在于:所述安装架(100)的外侧壁对称设置有安装块(170),所述安装块(170)开通有安装孔(180)。
5.根据权利要求4所述的转镜结构,其特征在于:所述转杆(120)呈水平面方向转动,所述连接杆(210)呈竖直面方向转动。
6.根据权利要求5所述的转镜结构,其特征在于:所述电动升降杆(200)的输出杆底部铰接设置有电动伸缩杆(240),所述电动伸缩杆(240)的另一端铰接在安装板(220)顶部上。
7.一种激光雷达,其特征在于,包括:激光雷达本体(230);
技术总结
本技术公开的属于激光雷达技术领域,具体为一种激光雷达及其转镜结构,其中转镜结构包括安装架,安装架的底壁通过轴承一转动设置有垂直的转杆,转杆的顶端延伸转动位于安装架内腔且设置有蜗轮,安装架内腔通过轴承二转动设置有适配咬合蜗轮的蜗杆;转杆的底部设置有垂直的电动升降杆,电动升降杆的输出杆底端铰接转动设置有连接杆,连接杆的底端设置有安装板,其中激光雷达包括有激光雷达本体,安装板的底部安装用激光雷达本体。该技术,电动伸缩杆启动伸缩后,可调节激光雷达本体的角度;而通过电动升降杆启动伸缩后,可调节激光雷达本体的高度,伺服电机带动蜗杆转动,从而带动蜗轮转动,从而实现激光雷达本体的360°探测。
技术研发人员:吴顺风,马宏亮
受保护的技术使用者:安庆师范大学
技术研发日:20230504
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!