一种不规则弧形的表面成像装置的制作方法
本技术涉及检测装置,尤其涉及一种不规则弧形的表面成像装置。
背景技术:
1、在工业生产中,往往需要对具有不规则弧形的表面的产品进行成像检测。目前,已经有较多关于不规则弧形的表面检测的报道,比如cn209214562u、cn 115825099、cn111435076a、cn205720050u等等。但是,这些报道均存在不同的缺点,比如,cn111435076a的方法只能对体型较小且形状较为规则的曲面物体进行采集,对于形状无规则的且具有多曲面的机械件等并不适用,cn205720050u仍然仅适用于规则的球状物体,对于形状不规则的曲面无法适用。
技术实现思路
1、本实用新型的目的就在于提供一种不规则弧形的表面成像装置,以解决上述问题。
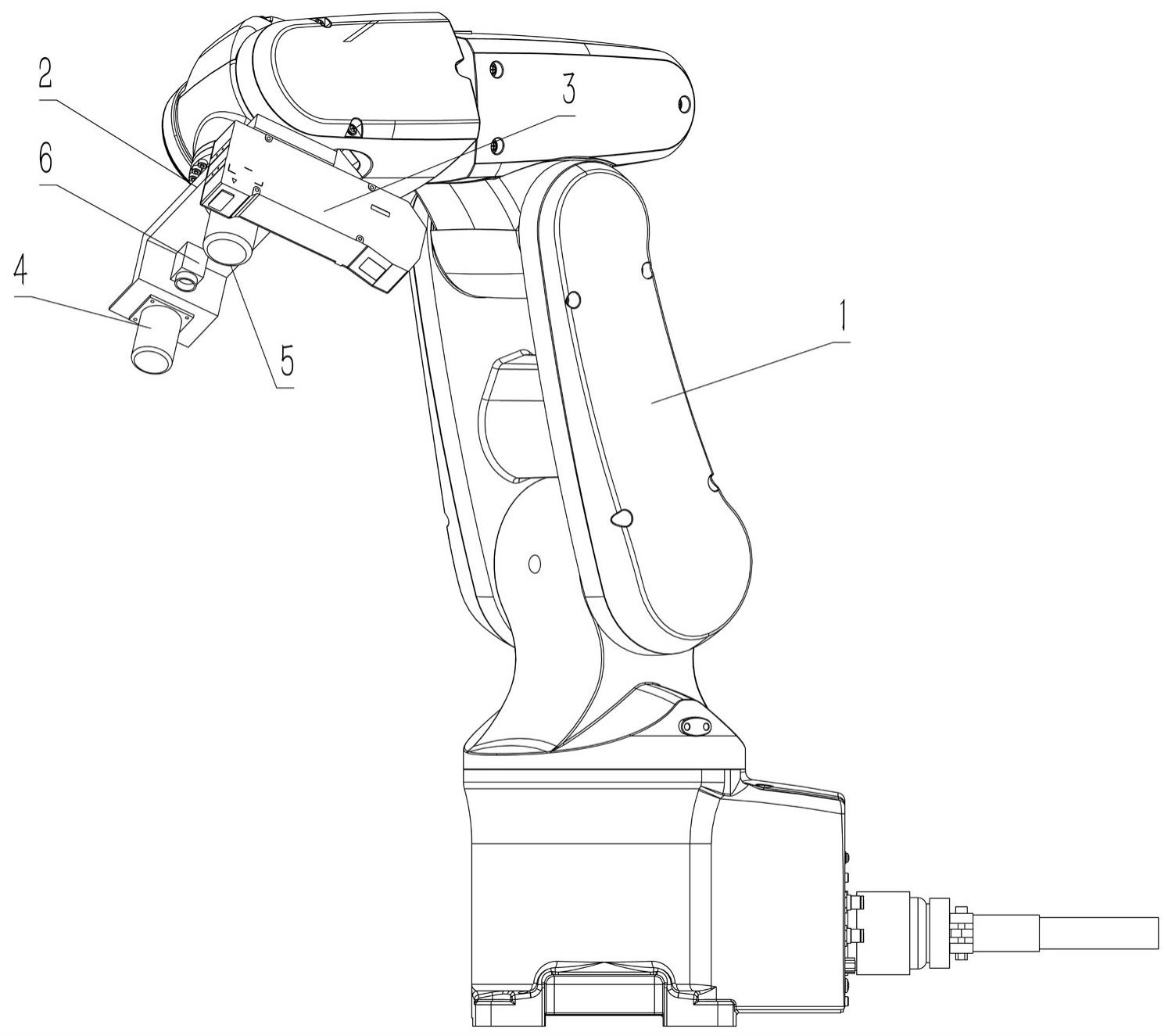
2、为了实现上述目的,本实用新型采用的技术方案是这样的:一种不规则弧形的表面成像装置,包括机器人,所述机器人的机械臂末端设置有固定工装,在所述固定工装安装有激光轮廓仪、陀螺仪、表面沾污仪探测器和摄像头,并设置有与所述激光轮廓仪、陀螺仪、表面沾污仪探测器和摄像头电连接的电源配电与控制柜。
3、作为优选的技术方案:所述机器人为六自由度串联机器人。
4、作为优选的技术方案:所述电源配电与控制柜输入为380v三相交流电电源,电源配电部分包括380v三相交流电源、一路24v直流电源、四路12v直流电源,一路5v直流电源,控制部分包括激光轮廓仪控制器和工控机,电源配电与控制柜内还设置有串口服务器转以太网模块和网关;其中,所述380v三相交流电源为机器人提供电源,所述24v直流电源为激光轮廓仪控制器提供电源,所述四路12v直流电源分别为表面沾污仪探测器、摄像头、工控机以及多路串口服务器转以太网模块供电,所述5v直流电源为陀螺仪供电。
5、作为进一步优选的技术方案:所述陀螺仪为九轴姿态传感器,采用rs485通信模块进行数据的通讯,通过rs485通信模块接入串口服务器转以太网模块,将数据模块转为tcp/ip协议,通过网关与工控机进行数据的交互。
6、作为进一步优选的技术方案:所述激光轮廓仪的供电通过屏蔽电缆与激光轮廓仪控制器直接相连,并采用网线通过网关与工控机相连进行数据的交互。采用屏蔽线进行供电,其电源线的应当尽量短一些。
7、作为进一步优选的技术方案:所述表面沾污仪探测器为采用塑料闪烁体探测器作为前端探测器,通过rs485通信模块接入多路串口服务器转以太网模块与工控机进行交互,通过屏蔽电缆将12v直流电源与之相连。
8、本实用新型通过基于六自由度串联机器人作为平台结合高清工业摄像头所获取的数据与激光轮廓仪所获得的摄像头获取的数据,可以获得不规则表面的点云数据充分的利用由陀螺仪和工业摄像头构成的反馈系统,完成对于不规则工件表面数据的建模,避免三维点云数据黑洞。
9、本实用新型所采用的基于六自由度串联机器人作为平台,还能对核辐射污染的材料表面的放射性污染情况进行测量,有利于工件进行的检定和评价,为去污效果进行评定。
10、本实用新型采用高清工业摄像头作为整体规划布局的装置,对工件的边缘等信息进行检定,以利于激光轮廓仪进行工作,另外根据激光轮廓仪的数据,机器人的末端能够与工件保持在一定的高度范围内。
11、与现有技术相比,本实用新型的优点在于:本申请提供了一种基于定物距与轨迹规划的表面成像系统,基于眼在手系统,将视觉感知系统构建在机械臂末端,利用机械臂末端规划路径运动,采集不规则机械件表面图像,根据规划轨迹间的关系,将图像数据集上下帧进行匹配拼接,形成不规则机械件的展开图,完成不规则机械件的表面成像;本装置可应用于机械件的表面图像采集和质量检测领域,实现检测自动化,降低企业劳动成本,提升检测效率;
12、另外,本申请提供了一种用于对表面污染进行测量的方法,目前多采用定点的方法对表面污染进行测量,采用该方法效率低,不利于工作的开展;本申请用机械臂进行平移,其实质是评估整个面上的平均污染情况,有利于工作的进一步展开。
技术特征:
1.一种不规则弧形的表面成像装置,其特征在于:包括机器人(1),所述机器人(1)的机械臂末端设置有固定工装(2),在所述固定工装(2)安装有激光轮廓仪(3)、陀螺仪(4)、表面沾污仪探测器(5)和摄像头(6),并设置有与所述激光轮廓仪(3)、陀螺仪(4)、表面沾污仪探测器(5)和摄像头(6)电连接的电源配电与控制柜(7)。
2.根据权利要求1所述的一种不规则弧形的表面成像装置,其特征在于:所述机器人(1)为六自由度串联机器人。
3.根据权利要求1所述的一种不规则弧形的表面成像装置,其特征在于:所述电源配电与控制柜(7)输入为380v三相交流电电源,电源配电部分包括380v三相交流电源(9)、一路24v直流电源(10)、四路12v直流电源(11),一路5v直流电源(12),控制部分包括激光轮廓仪控制器(13)和工控机(14),电源配电与控制柜(7)内还设置有串口服务器转以太网模块(15)和网关(16);其中,所述380v三相交流电源(9)为机器人(1)提供电源,所述24v直流电源(10)为激光轮廓仪控制器(13)提供电源,所述四路12v直流电源(11)分别为表面沾污仪探测器(5)、摄像头(6)、工控机(14)以及多路串口服务器转以太网模块(15)供电,所述5v直流电源(12)为陀螺仪(4)供电。
4.根据权利要求3所述的一种不规则弧形的表面成像装置,其特征在于:所述陀螺仪(4)为九轴姿态传感器,采用rs485通信模块(17)进行数据的通讯,通过rs485通信模块(17)接入串口服务器转以太网模块(15),将数据模块转为tcp/ip协议,通过网关(16)与工控机(14)进行数据的交互。
5.根据权利要求3所述的一种不规则弧形的表面成像装置,其特征在于:所述激光轮廓仪(3)的供电通过屏蔽电缆与激光轮廓仪控制器(13)直接相连,并采用网线通过网关(16)与工控机(14)相连进行数据的交互。
6.根据权利要求3所述的一种不规则弧形的表面成像装置,其特征在于:所述表面沾污仪探测器(5)为采用塑料闪烁体探测器作为前端探测器,通过rs485通信模块(17)接入多路串口服务器转以太网模块(15)与工控机(14)进行交互,通过屏蔽电缆将12v直流电源(11)与之相连。
技术总结
本技术公开了一种不规则弧形的表面成像装置,属于检测装置技术领域,包括机器人(1),所述机器人(1)的机械臂末端设置有固定工装(2),在所述固定工装(2)安装有激光轮廓仪(3)、陀螺仪(4)、表面沾污仪探测器(5)和摄像头(6),并设置有与所述激光轮廓仪(3)、陀螺仪(4)、表面沾污仪探测器(5)和摄像头(6)电连接的电源配电与控制柜(7);本装置可应用于机械件的表面图像采集和质量检测领域,实现检测自动化,降低企业劳动成本,提升检测效率。
技术研发人员:郭万佳,王立娟,刘欢,马松,唐梓洋,廖军,李念柯
受保护的技术使用者:四川安信科创科技有限公司
技术研发日:20230511
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!