一种高精度可移动的激光测距装置的制作方法
本技术涉及无人机测距,特别是指一种高精度可移动的激光测距装置。
背景技术:
1、无人机是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器,广泛应用于军事、科研和生活领域,可以在火灾、地震等灾害现场替代地面交通工具,到达环境恶劣的场所查看情况进行救援,也可以在气象、航天方面进行数据采集和勘探,也可用在核辐射探测、航空摄影、航空探矿、交通巡逻、治安监控等方面。
2、现有的无人机一般通过在其自身上安装有红外激光测距仪,通过红外技术进行测距作业。然而,现有的红外激光测距仪由于多是固定安装无人机的底部或顶部,使得无人机上的红外激光测距仪仅能对无人机的下方或上方的物体进行测距,测量视角受限较多。
技术实现思路
1、为了解决背景技术中所存在的现有无人机上的红外激光测距仪仅能对无人机的下方或上方的物体进行测距,测量视角受限较多的问题,本实用新型提出了一种高精度可移动的激光测距装置。
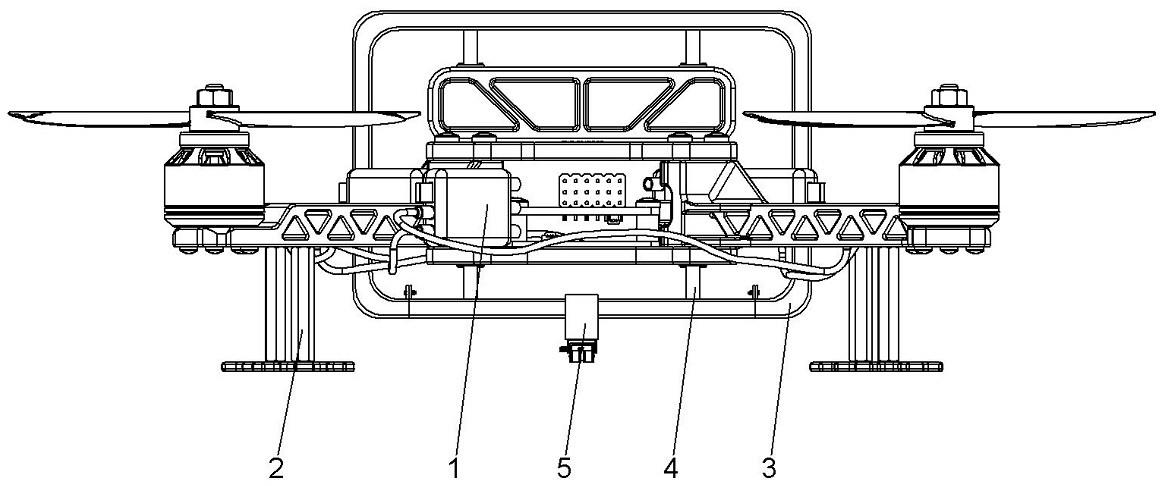
2、本实用新型的技术方案是:一种高精度可移动的激光测距装置,包括无人机、环形轨道和移动式激光测距机构;
3、环形轨道竖向环绕设在无人机的机身周侧,环形轨道的内侧与机身通过连接杆固定连接,环形轨道位于无人机的前后旋翼之间,环形轨道的截面为工字型结构,环形轨道远离机身的一侧固定设有环形的齿条;
4、移动式激光测距机构包括移动机构和固定设在移动机构底部的激光测距机构,移动机构挂设在环形轨道上,移动机构用以带动激光测距机构沿着环形轨道进行移动;
5、移动机构包括上开口且左右通透的第一框板,第一框板套设在环形轨道的外部,第一框板的前后侧板上设有两个前后对应设置的第一限位杆,第一框板的前侧板上设有第二限位杆,第二限位杆位于第一限位杆的下方,第一限位杆和第二限位杆均沿前后方向延伸,第一限位杆和第二限位杆分别滑动设在环形轨道的底部翼缘板上下两侧;
6、第一框板的后侧板上固定设有驱动电机,驱动电机的输出轴延伸至环形轨道的下方,驱动电机的输出轴上固定设有驱动齿轮,驱动齿轮与齿条相互啮合;
7、激光测距机构包括有激光测距仪,激光测距仪的激光发射端和激光接收端朝向正下方;
8、无人机的底部固定设有支腿,激光测距机构的下端面位于支腿的下端的上方。
9、优选的,第一限位杆和第二限位杆均与第一框板转动连接。
10、优选的,第一框板的前后侧板上转动设有两个前后对应设置的行走轮,行走轮与环形轨道的腹板滚动接触。
11、优选的,激光测距机构包括第二框板和位于第二框板内部的安装座,激光测距仪可拆固定设在安装座的底部;
12、第二框板为下开口且前后通透结构,第二框板的左右两个侧板上均转动穿设有转轴,两个转轴的相对一端与安装座固定连接,其中一个转轴远离安装座的一端与调角电机的输出轴固定连接,调角电机固定设在第二电机壳内,第二电机壳与第二框板固定连接。
13、优选的,安装座的底部可拆固定连接有限位罩,限位罩套设在激光测距仪外部,限位罩的底部开设有与激光测距仪激光发射端和激光接收端对应的通孔。
14、优选的,安装座的底部固定设有第一l型插板头,限位罩的上端固定设有第二l型插板头,第一l型插板头和第二l型插板头左右错位且贴靠连接;
15、第二l型插板头上设有左右通透的内螺纹孔,第一l型插板头上设有与内螺纹孔做鱼对应的螺孔,螺孔和内螺纹孔内穿设有顶固螺杆,内螺纹孔与顶固螺杆螺纹连接,顶固螺杆的其中一端抵靠在激光测距仪的外壁上。
16、优选的,环形轨道包括第一轨道件和第二轨道件,第一轨道件为下开口的门型结构,第一轨道件的下开口能够供无人机的机身穿过,第二轨道件沿左右方向延伸;
17、第一轨道件的两个下端顶部固定设有第一连接板,第二轨道件的左右两端顶部固定设有第二连接板,第一连接板和第二连接板左右对应,第一连接板和第二连接板上穿设有用以固定的螺栓;
18、第一轨道件和第二轨道件在第一连接板和第二连接板上的螺栓固定下能够形成连续的环形结构。
19、本实用新型的优点:在进行测量时,移动机构的驱动电机带动驱动齿轮转动,使驱动齿轮沿着环形轨道外侧的齿条进行环向移动,使激光测距仪能够完成对无人机的上下左右四个方向的测量。
20、在移动机构沿着环形轨道运动的过程中,第一框板、第一限位杆和第二限位杆相互配合,能够保证移动机构运动至环形轨道上的任意位置均不会掉落。
技术特征:
1.一种高精度可移动的激光测距装置,其特征在于:包括无人机(1)、环形轨道(3)和移动式激光测距机构(5);
2.如权利要求1所述的一种高精度可移动的激光测距装置,其特征在于:第一限位杆(10)和第二限位杆(11)均与第一框板(7)转动连接。
3.如权利要求1或2所述的一种高精度可移动的激光测距装置,其特征在于:第一框板(7)的前后侧板上转动设有两个前后对应设置的行走轮(12),行走轮(12)与环形轨道(3)的腹板滚动接触。
4.如权利要求1或2所述的一种高精度可移动的激光测距装置,其特征在于:激光测距机构包括第二框板(18)和位于第二框板(18)内部的安装座(14),激光测距仪(13)可拆固定设在安装座(14)的底部;
5.如权利要求4所述的一种高精度可移动的激光测距装置,其特征在于:安装座(14)的底部可拆固定连接有限位罩(15),限位罩(15)套设在激光测距仪(13)外部,限位罩(15)的底部开设有与激光测距仪(13)激光发射端和激光接收端对应的通孔。
6.如权利要求5所述的一种高精度可移动的激光测距装置,其特征在于:安装座(14)的底部固定设有第一l型插板头,限位罩(15)的上端固定设有第二l型插板头(16),第一l型插板头和第二l型插板头(16)左右错位且贴靠连接;
7.如权利要求1或2所述的一种高精度可移动的激光测距装置,其特征在于:环形轨道(3)包括第一轨道件(301)和第二轨道件(302),第一轨道件(301)为下开口的门型结构,第一轨道件(301)的下开口能够供无人机(1)的机身穿过,第二轨道件(302)沿左右方向延伸;
技术总结
本技术提供了一种高精度可移动的激光测距装置,解决了现有无人机上的红外激光测距仪仅能对无人机的下方或上方的物体进行测距,测量视角受限较多的问题。本技术包括无人机、环形轨道和移动式激光测距机构;环形轨道竖向环绕设在无人机的机身周侧,环形轨道位于无人机的前后旋翼之间,移动机构挂设在环形轨道上,移动机构用以带动激光测距机构沿着环形轨道进行移动;激光测距机构包括有激光测距仪,激光测距仪的激光发射端和激光接收端朝向正下方;无人机的底部固定设有支腿,激光测距机构的下端面位于支腿的下端的上方。在测量时,移动机构沿着环形轨道外侧的齿条进行环向移动,使激光测距仪能够完成对无人机的上下左右四个方向的测量。
技术研发人员:马康,禹春来,张具琴,王缓缓,付瑞玲
受保护的技术使用者:中科威客科技(河南)有限公司
技术研发日:20230512
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!