码盘定位精度高的机器人驱动机构用码盘控制组件的制作方法
本技术涉及一种机器人驱动机构的局部结构,尤其涉及一种码盘定位精度高的机器人驱动机构用码盘控制组件。
背景技术:
1、随着经济的飞速发展,越来越多的企业开始使用机器人代替工人以降低成本,协作机器人因其价格低廉、安全易维护、精度高等优点更是受到市场的欢迎。协作机器人的主要组件就是驱动机构,其承担协作机器人的传动和负载,所以驱动机构的质量好坏会影响协作机器人的负载、震动、重复定位精度等。
2、如图1所示,传统机器人驱动机构包括外壳5、独立谐波减速机1、独立抱闸4、电机定子6、电机转子7、外码盘8、内码盘9、码盘控制板10和后盖11,组装时,先将独立抱闸4安装在独立谐波减速机1上再一起置于外壳5内的一端,电机定子6预先安装在外壳5内的中部,将电机转子7置于电机定子 6内并在机转子7的端部安装嵌套(图中未标记),将外码盘8粘贴安装在电机转子7另一端的嵌套上,独立谐波减速机1的旋转输入轴2与电机转子7的一端连接,独立波减速机1的旋转输出轴3穿过旋转输入轴2和电机转子 7的中心通孔,将内码盘9粘贴安装在旋转输出轴的端部,将码盘控制板10安装在外壳5内的另一端,再将后盖11与外壳5的另一端连接,即完成整个机器人驱动机构的组装。工作时,电机定子6内的线圈得电使电机转子7旋转,带动旋转输入轴2旋转,经过独立谐波减速机1减速传动后,旋转动力一方面通过外端的连接法兰传输给其它设备,另一方面带动旋转输出轴3同步旋转,旋转输出轴3带动内码盘9同步旋转,电机转子7同步带动外码盘8旋转,码盘控制板10上的传感器检测到外码盘8和内码盘9旋转产生的变化磁信号,经过处理器处理后得到外码盘8和内码盘9的转速信息,即实现对旋转输入轴2和旋转输出轴3的实时转速检测功能。
3、上述传统机器人驱动机构中,两个码盘是保证驱动机构定位精度的关键零件,对安装同心度、轴向跳动、检测距离部有着严格的要求,传统机器人驱动机构的外码盘直接安装在电机转子一端的嵌套上,轴向安装尺寸经过多个零件公差累计,外码盘到码盘控制板上传感器之间的距离很难控制,内码盘也是直接安装在旋转输出轴的悬空端,因为安装位置没有支撑结构,内码盘的同心度和轴向跳动很难控制在要求范围内,需要花费大量时间去调整,最终导致驱动机构的定位精度低,导致实时转速检测精度降低。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种能够单独组装后再与其它部件连接的码盘定位精度高的机器人驱动机构用码盘控制组件。
2、本实用新型通过以下技术方案来实现上述目的:
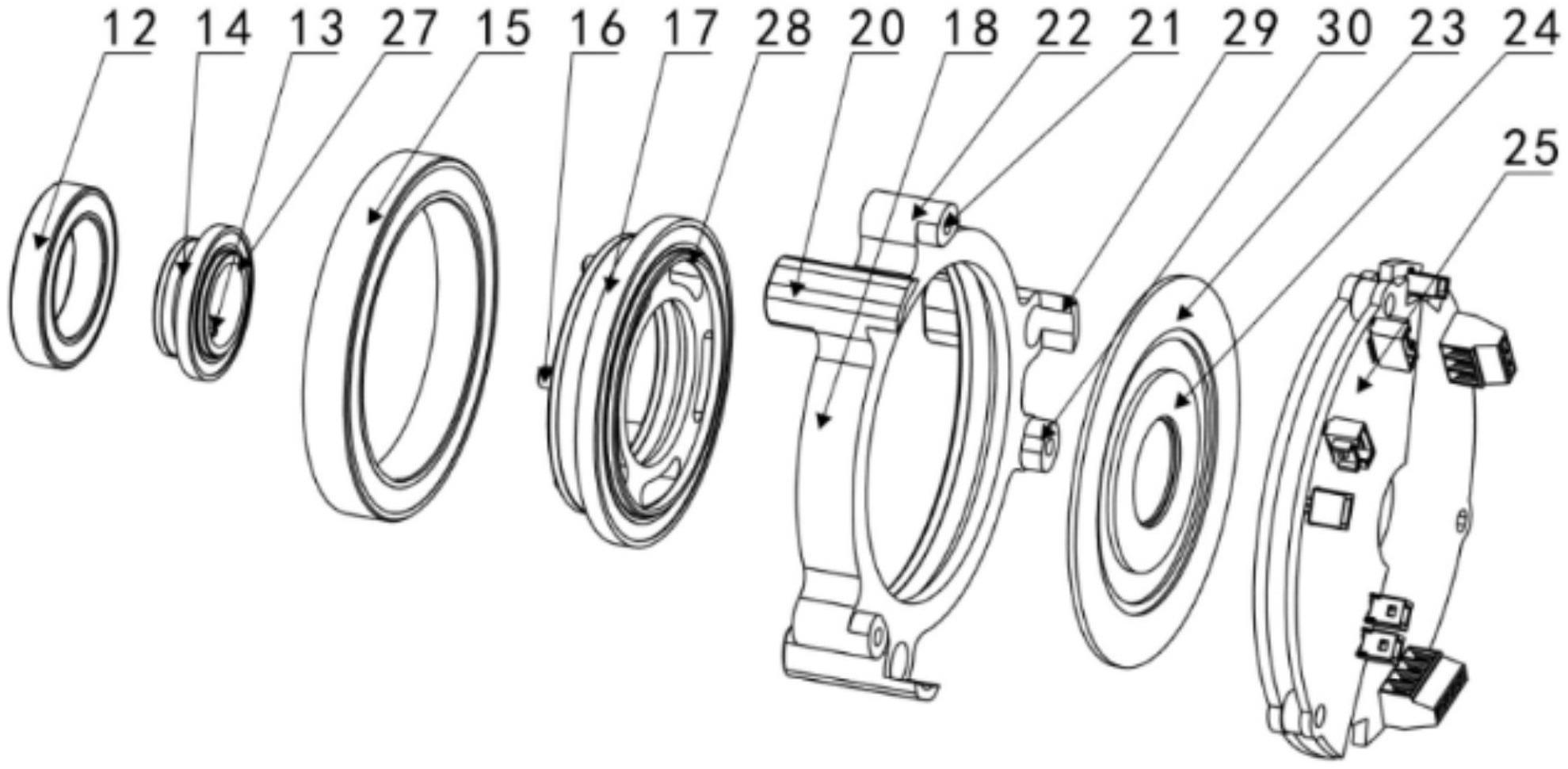
3、一种码盘定位精度高的机器人驱动机构用码盘控制组件,包括码盘基座、外轴承、内轴承、输入码盘座、输出码盘座、输入轴码盘、输出轴码盘和控制板,所述外轴承的外圈与圆环形的所述码盘基座的中心通孔孔壁连接且位于所述码盘基座的一侧,所述控制板安装在所述码盘基座的另一侧,圆环形的所述输入码盘座的圆周外壁与所述外轴承的内圈连接,所述内轴承的外圈与所述输入码盘座的圆周内壁连接,圆环形的所述输出码盘座的圆周外壁与所述内轴承的内圈连接,圆环形的所述输入轴码盘安装在所述输入码盘座上靠近所述控制板的一侧,圆环形的所述输出轴码盘安装在所述输出码盘座上靠近所述控制板的一侧。
4、作为优选,为了便于与机器人驱动机构的其它部件快速传动连接且便于快速拆卸,所述输入码盘座上远离所述控制板的一侧圆环壁上均匀设有多个外连接柱,所述输出码盘座上远离所述控制板的一侧圆周内壁上均匀设有多个内连接柱,所述外连接柱的中心线和所述内连接柱的中心线均与所述码盘基座的中心通孔的中心线相互平行。
5、作为优选,为了便于与机器人驱动机构的其它部件可靠连接,所述码盘基座的圆周外壁均匀设有多个第一连接柱和第二连接柱,所述第一连接柱设有第一连接孔,所述第二连接柱设有第二连接孔,所述第一连接孔和所述第二连接孔为通孔或螺孔,所述第一连接柱的中心线、所述第一连接孔的中心线、所述第二连接柱的中心线和所述第二连接孔的中心线均与所述码盘基座的中心通孔的中心线相互平行。
6、作为优选,为了便于对控制极进行周向和轴向限位以进一步提高定位精度,所述第一连接柱的两端分别延伸至所述码盘基座的两侧外,所述第一连接柱上靠近所述控制板的一端向外周方向减薄形成用于对所述控制极进行周向限位的周向限位部,所述控制板位于多个所述第一连接柱的周向限位部所围成的区域内,所述第二连接柱的两端分别相比于所述第一连接柱的两端内缩,所述第二连接柱上靠近所述控制板的一端端面为平面且该端形成轴向限位部,多个所述第二连接柱的轴向限位部端面齐平,所述控制板的一侧表面与多个所述第二连接柱的轴向限位部端面接触。
7、作为优选,为了便于对输入轴码盘和输出轴码盘进行更好的定位以进一步提高定位精度,所述输入码盘座上靠近所述控制极的一侧表面靠近其中心通孔的位置设有外凸的外定位凸环,所述输入轴码盘通过自身中心通孔套装在所述外定位凸环上,所述输出码盘座上靠近所述控制板的一侧表面靠近其中心通孔的位置设有外凸的内定位凸环,所述输出轴码盘通过自身中心通孔套装在所述内定位凸环上。
8、作为优选,为了便于快速安装两个码盘,所述输入轴码盘粘贴安装在所述输入码盘座上,所述输出轴码盘粘贴安装在所述输出码盘座上。
9、本实用新型的有益效果在于:
10、本实用新型通过将两个码盘用两个轴承和两个码盘座安装在码盘基座上,使两个码盘能够相对于码盘基座实现精确定位且能自由旋转,与其它部件连接时只需将两个码盘座与其它对应部件传动连接、将码盘基座与其它对应部件固定连接,则可实现两个码盘与其它部件的高精度定位连接,两个码盘的同心度和轴向跳动均能被可靠控制,最终提高了机器人驱动机构的定位精度和实时转速检测精度;通过在第一连接柱上设置周向限位部,在第二连接柱上设置轴向限位部,能够对控制板进行更好的周向和轴向定位,从而确保控制板上的传感器与两个码盘之间处于合适的相对位置,从而进一步提高了机器人驱动机构的定位精度和实时转速检测精度。
技术特征:
1.一种码盘定位精度高的机器人驱动机构用码盘控制组件,其特征在于:包括码盘基座、外轴承、内轴承、输入码盘座、输出码盘座、输入轴码盘、输出轴码盘和控制板,所述外轴承的外圈与圆环形的所述码盘基座的中心通孔孔壁连接且位于所述码盘基座的一侧,所述控制板安装在所述码盘基座的另一侧,圆环形的所述输入码盘座的圆周外壁与所述外轴承的内圈连接,所述内轴承的外圈与所述输入码盘座的圆周内壁连接,圆环形的所述输出码盘座的圆周外壁与所述内轴承的内圈连接,圆环形的所述输入轴码盘安装在所述输入码盘座上靠近所述控制板的一侧,圆环形的所述输出轴码盘安装在所述输出码盘座上靠近所述控制板的一侧。
2.根据权利要求1所述的码盘定位精度高的机器人驱动机构用码盘控制组件,其特征在于:所述输入码盘座上远离所述控制板的一侧圆环壁上均匀设有多个外连接柱,所述输出码盘座上远离所述控制板的一侧圆周内壁上均匀设有多个内连接柱,所述外连接柱的中心线和所述内连接柱的中心线均与所述码盘基座的中心通孔的中心线相互平行。
3.根据权利要求1或2所述的码盘定位精度高的机器人驱动机构用码盘控制组件,其特征在于:所述码盘基座的圆周外壁均匀设有多个第一连接柱和第二连接柱,所述第一连接柱设有第一连接孔,所述第二连接柱设有第二连接孔,所述第一连接孔和所述第二连接孔为通孔或螺孔,所述第一连接柱的中心线、所述第一连接孔的中心线、所述第二连接柱的中心线和所述第二连接孔的中心线均与所述码盘基座的中心通孔的中心线相互平行。
4.根据权利要求3所述的码盘定位精度高的机器人驱动机构用码盘控制组件,其特征在于:所述第一连接柱的两端分别延伸至所述码盘基座的两侧外,所述第一连接柱上靠近所述控制板的一端向外周方向减薄形成用于对所述控制板进行周向限位的周向限位部,所述控制板位于多个所述第一连接柱的周向限位部所围成的区域内,所述第二连接柱的两端分别相比于所述第一连接柱的两端内缩,所述第二连接柱上靠近所述控制板的一端端面为平面且该端形成轴向限位部,多个所述第二连接柱的轴向限位部端面齐平,所述控制板的一侧表面与多个所述第二连接柱的轴向限位部端面接触。
5.根据权利要求1或2所述的码盘定位精度高的机器人驱动机构用码盘控制组件,其特征在于:所述输入码盘座上靠近所述控制板的一侧表面靠近其中心通孔的位置设有外凸的外定位凸环,所述输入轴码盘通过自身中心通孔套装在所述外定位凸环上,所述输出码盘座上靠近所述控制板的一侧表面靠近其中心通孔的位置设有外凸的内定位凸环,所述输出轴码盘通过自身中心通孔套装在所述内定位凸环上。
6.根据权利要求1或2所述的码盘定位精度高的机器人驱动机构用码盘控制组件,其特征在于:所述输入轴码盘粘贴安装在所述输入码盘座上,所述输出轴码盘粘贴安装在所述输出码盘座上。
技术总结
本技术公开了一种码盘定位精度高的机器人驱动机构用码盘控制组件,包括码盘基座、外轴承、内轴承、输入码盘座、输出码盘座、输入轴码盘、输出轴码盘和控制板,外轴承的外圈与码盘基座的中心通孔孔壁连接且位于码盘基座的一侧,控制板安装在码盘基座的另一侧,输入码盘座的圆周外壁与外轴承的内圈连接,内轴承的外圈与输入码盘座的圆周内壁连接,输出码盘座的圆周外壁与内轴承的内圈连接,输入轴码盘安装在输入码盘座上靠近控制板的一侧,输出轴码盘安装在输出码盘座上靠近控制板的一侧。本技术使两个码盘能够实现精确定位且能自由旋转,两个码盘的同心度和轴向跳动均能被可靠控制,提高了机器人驱动机构的定位精度和实时转速检测精度。
技术研发人员:苏太郎,李星
受保护的技术使用者:成都瑞迪智驱科技股份有限公司
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!