一种双目雷视一体机装置的制作方法
本技术涉及智慧交通,尤其涉及一种双目雷视一体机装置。
背景技术:
1、随着智慧交通的发展,用毫米波雷达、激光雷达、相机等设备进行多源信息融合的检测方法逐渐成为主流的检测方法。目前,在一些特定时段内会出现车流量激增的情况,用现有设备进行检测时,远处的像素点少,导致清晰度下降,无法识别车辆信息;同时针对不同场景,尤其是在夜晚场景下,城市道路交通效率低下,传统的雷达与视觉配合检测车流的方法效果无法满足检测需求。
2、因此,如何能够提升不同场景下的车流检测效果成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、本实用新型提供了一种双目雷视一体机装置,解决相关技术中存在的无法在不同场景下对车流进行检测的问题。
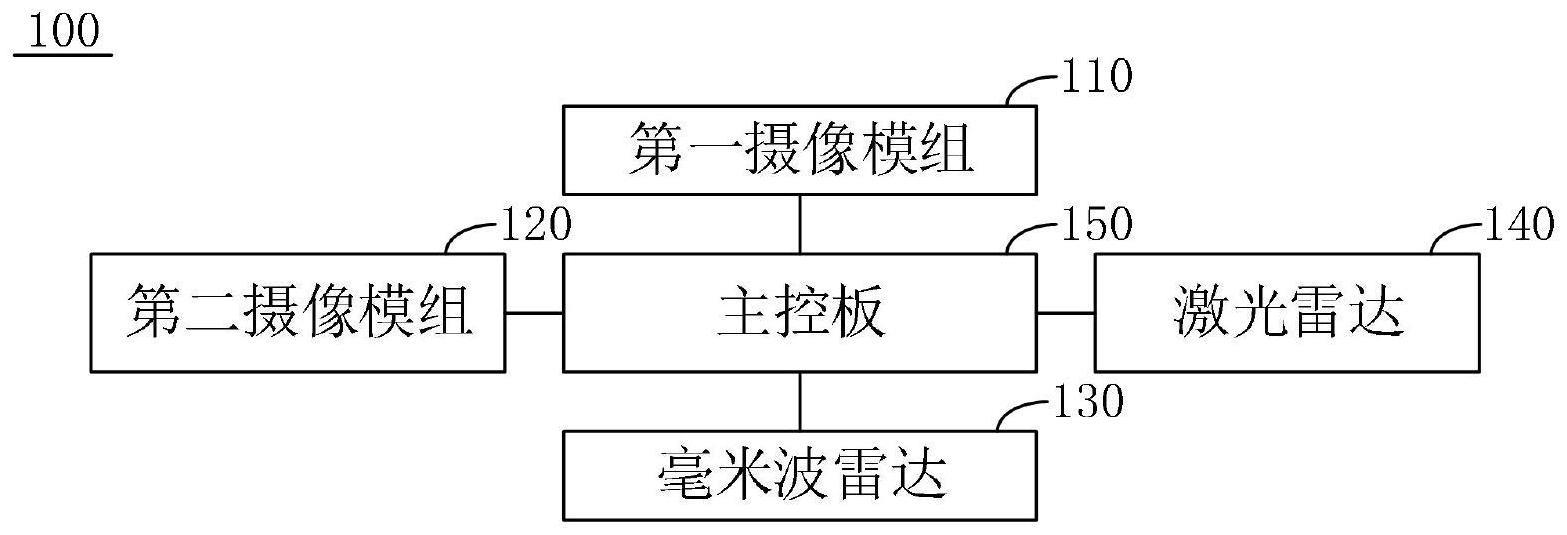
2、作为本实用新型的一个方面,提供一种双目雷视一体机装置,其中,包括:第一摄像模组、第二摄像模组、毫米波雷达、激光雷达和主控板,所述第一摄像模组、第二摄像模组、毫米波雷达和激光雷达均与所述主控板通信连接;
3、所述第一摄像模组用于根据驱动信号进行自动对焦以实现对近景和远景的目标图像采集;
4、所述第二摄像模组用于实时采集远景和近景的目标红外图像信息;
5、所述毫米波雷达用于实时探测周围目标信息,获得目标毫米波探测信息;
6、所述激光雷达用于实时对周围目标进行激光探测,获得目标激光探测信息;
7、所述主控板用于根据所述目标图像采集信息、目标红外图像信息、目标毫米波探测信息以及目标激光探测信息进行联合标定以及数据处理后获得目标检测结果。
8、进一步地,所述第一摄像模组包括焦距可变式摄像头和驱动电机,所述驱动电机与所述焦距可变式摄像头连接,所述驱动电机能够根据驱动信号对所述焦距可变式摄像头进行驱动以实现焦距可变式摄像头的自动对焦。
9、进一步地,所述驱动电机包括微型直流电机。
10、进一步地,所述第二摄像模组包括红外摄像头。
11、进一步地,还包括:人机交互模组,所述人机交互模组与所述主控板通信连接,用于实现数据存储以及人机交互。
12、进一步地,所述人机交互模组包括:存储器和交互模块,所述存储器用于存储采集数据以及目标检测结果,所述交互模块用于实现参数设置以及检测结果显示。
13、进一步地,所述交互模块包括触摸显示屏。
14、进一步地,所述交互模块包括显示屏和输入输出模块。
15、进一步地,还包括壳体,所述壳体上安装有相邻的第一相机支架和第二相机支架,所述第一相机支架用于安装所述第一摄像模组,所述第二相机支架用于安装第二摄像模组,所述毫米波雷达、激光雷达以及主控板均安装在所述壳体内。
16、进一步地,所述主控板包括arm开发板。
17、本实用新型提供的双目雷视一体机装置,通过第一摄像模组与第二摄像模组结合,既能实现对远近景的目标图像采集,又能够通过第二摄像模组的红外图像信息采集弥补光线较差的情况下的性能缺陷,提高了雷视一体机的整体效率;另外通过毫米波雷达和激光雷达的结合,能够实现对交通目标的多角度信息探测。因此,本实用新型提供的双目雷视一体机装置能够在不同场景下对车流目标进行有效检测。
技术特征:
1.一种双目雷视一体机装置,其特征在于,包括:第一摄像模组、第二摄像模组、毫米波雷达、激光雷达和主控板,所述第一摄像模组、第二摄像模组、毫米波雷达和激光雷达均与所述主控板通信连接;
2.根据权利要求1所述的双目雷视一体机装置,其特征在于,所述第一摄像模组包括焦距可变式摄像头和驱动电机,所述驱动电机与所述焦距可变式摄像头连接,所述驱动电机能够根据驱动信号对所述焦距可变式摄像头进行驱动以实现焦距可变式摄像头的自动对焦。
3.根据权利要求2所述的双目雷视一体机装置,其特征在于,所述驱动电机包括微型直流电机。
4.根据权利要求1所述的双目雷视一体机装置,其特征在于,所述第二摄像模组包括红外摄像头。
5.根据权利要求1至4中任意一项所述的双目雷视一体机装置,其特征在于,还包括:人机交互模组,所述人机交互模组与所述主控板通信连接,用于实现数据存储以及人机交互。
6.根据权利要求5所述的双目雷视一体机装置,其特征在于,所述人机交互模组包括:存储器和交互模块,所述存储器用于存储采集数据以及目标检测结果,所述交互模块用于实现参数设置以及检测结果显示。
7.根据权利要求6所述的双目雷视一体机装置,其特征在于,所述交互模块包括触摸显示屏。
8.根据权利要求6所述的双目雷视一体机装置,其特征在于,所述交互模块包括显示屏和输入输出模块。
9.根据权利要求1至4中任意一项所述的双目雷视一体机装置,其特征在于,还包括壳体,所述壳体上安装有相邻的第一相机支架和第二相机支架,所述第一相机支架用于安装所述第一摄像模组,所述第二相机支架用于安装第二摄像模组,所述毫米波雷达、激光雷达以及主控板均安装在所述壳体内。
10.根据权利要求1至4中任意一项所述的双目雷视一体机装置,其特征在于,所述主控板包括arm开发板。
技术总结
本技术涉及智慧交通技术领域,具体公开了一种双目雷视一体机装置,其中,包括:第一摄像模组、第二摄像模组、毫米波雷达、激光雷达和主控板;第一摄像模组用于根据驱动信号进行自动对焦以实现对近景和远景的目标图像采集;第二摄像模组用于实时采集远景和近景的目标红外图像信息;毫米波雷达用于实时探测周围目标信息,获得目标毫米波探测信息;激光雷达用于实时对周围目标进行激光探测,获得目标激光探测信息;主控板用于根据所述目标图像采集信息、目标红外图像信息、目标毫米波探测信息以及目标激光探测信息进行联合标定以及数据处理后获得目标检测结果。本技术提供的双目雷视一体机装置能够提升不同场景下的车流检测效果。
技术研发人员:汪宗洋,张仲义,岳玉涛,顾炎飚
受保护的技术使用者:江苏集萃深度感知技术研究所有限公司
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!