一种水质监测机器人
本技术涉及水质监测设备,尤其涉及一种水质监测机器人。
背景技术:
1、湖泊、水库水体作为我国重要的饮用水水源地,其水质的好坏关系到亿万民众饮水健康。随着人们对于饮用水以及饮用水处理手段的不断提高,对于水质监测手段的要求也越来越高;然而,传统的站房式水质自动监测站、浮标式水质检测器以及岸边水质自动监测站存在多个问题;例如,传统的站房式水质自动监测站选址难度大,建设周期长,采样点过于固定,代表性也不强,数据获取效率低;浮标式水质检测器难以自主掌握测定深度,且测定线路易受风、浪、潮的影响,可靠性相对较差,无法全面和综合掌握水源水的水质/水文特点。并且浮标式水质检测器容易受障碍物的碰撞,甚至损毁。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种便于减轻碰撞以及便于不同深度检测水质的水质监测机器人。
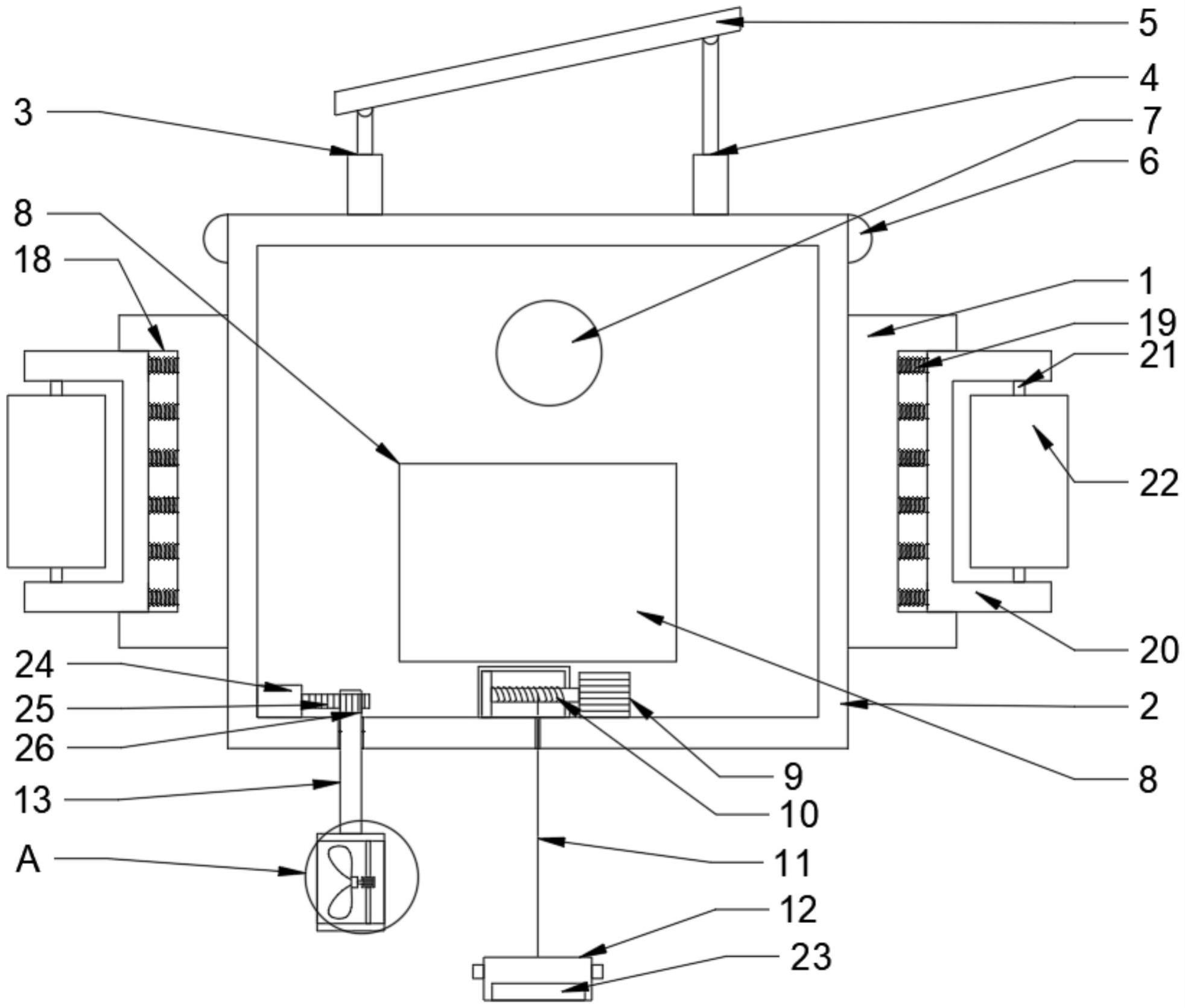
2、为解决上述技术问题,本实用新型提供的技术方案为:一种水质监测机器人,包括环形浮架和驱动桨组件,所述环形浮架上设置有减震装置,所述环形浮架内固定设置有安装壳,所述安装壳的顶部两侧侧壁上固定设置有激光测距仪,所述安装壳内设置有存储器,所述安装壳的内底部设置有蓄电池和第一电机,所述第一电机的驱动轴上同轴固定连接有卷绳轴,所述卷绳轴上绕有拉绳,所述拉绳的另一端密封穿出安装壳并于端部连接有水质检测器,所述的安装壳内设置有驱动桨转向机构。
3、进一步地,所述减震装置包括设置在所述环形浮架的四个侧面上的凹槽,所述凹槽的开口朝外,所述凹槽内设置有u型板,且所述u型板与凹槽滑动密封配合,所述u型板与所述凹槽的内底部之间固定设置有多根弹簧,所述u型板内固定设置有连接轴,所述连接轴上转动连接有转向辊,所述转向辊的外表面包覆有减震垫;减震垫的设置便于对碰撞物的撞击进行初步减震,转向辊的转动连接便于对碰撞物进行转向,弹簧、凹槽和u型板的设置便于进一步减震,尽量减小撞击对机器人的损伤。
4、进一步地,所述水质检测器上固定设置有配重块;配重块的设置便于保持拉绳与安装壳保持垂直,便于准确计量检测深度,同时也使得水质监测机器人在水面的漂浮稳定。
5、进一步地,所述水质监测机器人还包括太阳能板,所述安装壳的顶端固定有竖直设置的第一伸缩气缸和第二伸缩气缸,所述太阳能板的下端面的两头分别与所述第一伸缩气缸的活塞杆、第二伸缩气缸的活塞杆相铰接,所述太阳能板与所述蓄电池电连接,用于给蓄电池供电。
6、进一步地,所述驱动桨组件包括安装框、防水电机和驱动桨,所述安装框的两侧开口,且所述安装框的两侧开口端分别固定连接有滤网,所述安装框内固定设置有支撑杆,所述防水电机固定设置在所述支撑杆上,所述防水电机的动力输出端与所述驱动桨同轴固定,所述驱动桨位于所述安装框内。
7、进一步地,所述驱动桨转向机构包括第三伸缩气缸、齿条、齿轮和驱动杆,所述第三伸缩气缸水平固定在所述安装壳的内底部,所述齿条与所述第三伸缩气缸的活塞杆相固定,所述驱动杆的下端与所述安装框固定连接,所述驱动杆的上端向上伸入所述安装壳内,且所述驱动杆与所述安装壳密封转动连接,所述驱动杆的上端与所述齿轮同轴固定,所述齿轮与齿条相啮合。
8、与现有技术相比,本实用新型的优点是:
9、(1)、激光测距仪可对机器人的位置进行定位,且水质检测器的深度可调,通过水质检测器可检测不同深度的水质;
10、(2)、通过第一伸缩气缸和第二伸缩气缸的伸缩调节太阳能板的角度,可更有效率地吸收太阳能,进而储能至蓄电池;而蓄电池设置在安装壳的内底部还能充当配重块,大大减小机器人因受风、浪的影响而发生翻转的几率;
11、(3)、减震装置的设置避免因水中的漂流物对机器人进行碰撞而造成损伤。
技术特征:
1.一种水质监测机器人,包括环形浮架(1)和驱动桨组件,其特征在于:所述环形浮架(1)上设置有减震装置,所述环形浮架(1)内固定设置有安装壳(2),所述安装壳(2)顶部两侧侧壁上固定设置有激光测距仪(6),所述安装壳(2)内设置有存储器(7),所述安装壳(2)的内底部设置有蓄电池(8)和第一电机(9),所述第一电机(9)的驱动轴上同轴固定连接有卷绳轴(10),所述卷绳轴(10)上绕有拉绳(11),所述拉绳(11)的另一端密封穿出安装壳(2)并于端部连接有水质检测器(12),所述的安装壳内设置有驱动桨转向机构。
2.根据权利要求1所述的一种水质监测机器人,其特征在于:所述减震装置包括设置在所述环形浮架(1)的四个侧面上的凹槽(18),所述凹槽(18)开口朝外,所述凹槽(18)内设置有u型板(20),且所述u型板(20)与凹槽(18)滑动密封配合,所述u型板(20)与所述凹槽(18)的内底部之间固定设置有多根弹簧(19),所述u型板(20)内固定设置有连接轴(21),所述连接轴(21)上转动连接有转向辊(22),所述转向辊(22)的外表面包覆有减震垫。
3.根据权利要求1所述的一种水质监测机器人,其特征在于:所述水质检测器(12)上固定设置有配重块(23)。
4.根据权利要求1所述的一种水质监测机器人,其特征在于:还包括太阳能板(5),所述安装壳(2)的顶端固定有竖直设置的第一伸缩气缸(3)和第二伸缩气缸(4),所述太阳能板(5)的下端面的两头分别与所述第一伸缩气缸(3)的活塞杆、第二伸缩气缸(4)的活塞杆相铰接,所述太阳能板(5)与所述蓄电池(8)电连接,用于给蓄电池(8)供电。
5.根据权利要求1所述的一种水质监测机器人,其特征在于:所述驱动桨组件包括安装框(14)、防水电机(16)和驱动桨(17),所述安装框(14)的两侧开口,且所述安装框(14)的两侧开口端分别固定连接有滤网(27),所述安装框(14)内固定设置有支撑杆(15),所述防水电机(16)固定设置在所述支撑杆(15)上,所述防水电机(16)的动力输出端与所述驱动桨(17)同轴固定,所述驱动桨(17)位于所述安装框(14)内。
6.根据权利要求5所述的一种水质监测机器人,其特征在于:所述驱动桨转向机构包括第三伸缩气缸(24)、齿条(25)、齿轮(26)和驱动杆(13),所述第三伸缩气缸(24)水平固定在所述安装壳(2)的内底部,所述齿条(25)与所述第三伸缩气缸(24)的活塞杆相固定,所述驱动杆(13)的下端与所述安装框(14)固定连接,所述驱动杆(13)的上端向上伸入所述安装壳(2)内,且所述驱动杆(13)与所述安装壳(2)密封转动连接,所述驱动杆(13)的上端与所述齿轮(26)同轴固定,所述齿轮(26)与齿条(25)相啮合。
技术总结
本技术公开了一种水质监测机器人,包括环形浮架和驱动桨组件,特点是环形浮架上设置有减震装置,环形浮架内固定设置有安装壳,安装壳顶部两侧侧壁上固定设置有激光测距仪,安装壳内设置有存储器,安装壳的内底部设置有蓄电池和第一电机,第一电机的驱动轴上同轴固定连接有卷绳轴,卷绳轴上绕有拉绳,拉绳的另一端密封穿出安装壳并于端部连接有水质检测器,安装壳内设置有驱动桨转向机构;优点是激光测距仪可对机器人的位置进行定位,且水质检测器的深度可调;而蓄电池设置在安装壳的内底部还能充当配重块,大大减小机器人因受风、浪的影响而发生翻转的几率;减震装置的设置避免因水中的漂流物对机器人进行碰撞而造成损伤。
技术研发人员:戴洪嘉,黄宇安,劳涵韬,何纪扬,张水强
受保护的技术使用者:湖州师范学院
技术研发日:20230606
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!