一种目标模拟机器人装置的制作方法
本发明属于雷达测试,特别是涉及一种目标模拟机器人装置。
背景技术:
1、某地面侦察雷达在科研设计和生产交验过程中都需要验证其探测性能,目前采用以人工手持并摆动反射体,或者使用重型摇摆机的方法来模拟真实目标。雷达项目转产初期,型号单一产量较少,使用传统的目标模拟方法进行相关试验,可以满足生产调试任务的需求。但随着项目的发展,某型号雷达批量生产后,上述方式既费力,又使摇动反射体的人员受到长时间雷达辐射,不符合职业健康方面的规定,且无任何机动性,试验的效率和试验成本也会提高。
技术实现思路
1、要解决的技术问题:
2、为了避免现有技术的不足之处,本发明提供一种目标模拟机器人装置,高速伺服电机按规定方向与速率带动摇臂台旋转,以摇臂台回转中心做往复运动,通过摇臂台带动长悬臂摆动,进而实现角反射体按照规定角度和频率进行往复摆动,以及阵地方位旋转操作内容;同时完成摇臂台当前位置定位定向功能。本发明将摇臂台加装在远程控制履带式底盘上,满足复杂地形行进,解决了传统雷达试验效率低、成本高,及地形对测试机器人的限制等问题。
3、本发明的技术方案是:一种目标模拟机器人装置,包括移动底盘、搭载于其上的摇臂台组件和定位定向模块、以及装置的控制模块和供电模块;
4、通过所述移动底盘实现装置的位置移动;
5、所述摇臂台组件包括摇臂台、用于驱动摇臂台旋转的动力源、安装于摇臂转台上的长悬臂、及安装于长悬臂自由端的角反射体;
6、所述定位定向模块包括安装于摇臂台组件上的天线,用于静态、动态下的定位定向;
7、所述控制模块包括摇臂台控制盒、人机操控盒和通讯模块,摇臂台控制盒安装于摇臂台组件上并向其发送控制指令,人机操控盒为地面控制端;通过通讯模块进行摇臂台控制盒和人机操控盒之间的信息交互,即控制信号和反馈信号的传输;
8、所述供电模块用于装置各部件和模块的供电。
9、本发明的进一步技术方案是:所述摇臂台组件的动力源为伺服电机,所述伺服电机的输出轴通过传动系统与摇臂台连接,驱动摇臂台绕轴旋转;所述长悬臂的固定端安装于摇臂台上,以其中心为零点,由摇臂台带动在水平零面内左右摇摆幅度±40°,误差2~5°。
10、本发明的进一步技术方案是:所述摇臂台通过滑动轴承与移动底盘转动连接,并配合安装有限位装置,用于限制摇臂台旋转超限。
11、本发明的进一步技术方案是:所述限位装置为电限位、机械缓冲或机械限位。
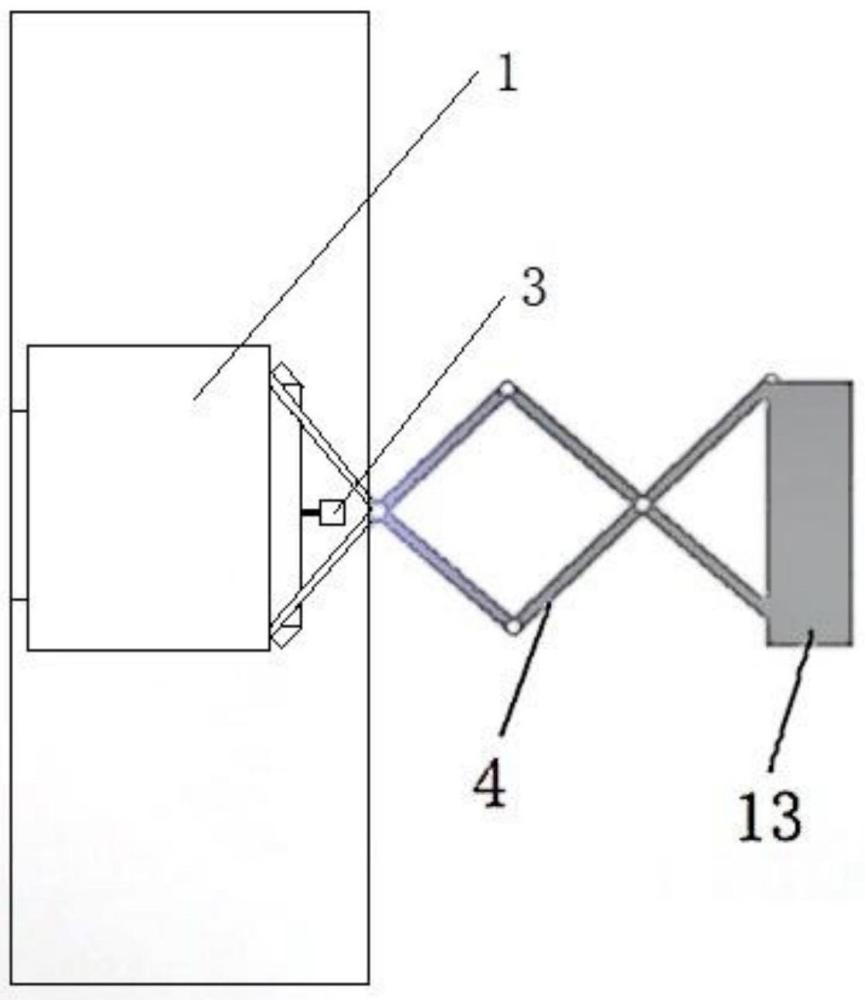
12、本发明的进一步技术方案是:所述长悬臂为叉剪式伸缩结构,通过改变伸缩长度改变长悬臂的长度。
13、本发明的进一步技术方案是:所述移动底盘为包括履带式底盘,所述摇臂台通过支架安装于履带式底盘上,支架内安装有伺服电机和齿轮传动组;齿轮传动组的输入端与伺服电机的输出轴连接,其输出端与摇臂台连接。
14、本发明的进一步技术方案是:所述履带式底盘包括远程遥控单元、电池、监控系统、照明系统及阻尼减震器,由远程遥控单元发送控制指令,电池采用锂电池;通过监控系统和照明系统对周围环境进行监测和照明,完成夜间或各种复杂路面的行进;通过其两侧设置的若干阻尼减震器减少行进过程中的震动。
15、本发明的进一步技术方案是:所述摇臂台组件还包括用于位置环检测的光电码盘,及用于速度环检测的测速机进行速度,分别将位置值进而速度反馈值传输至摇臂台控制盒。
16、本发明的进一步技术方案是:所述定位定向模块为hy-gadu501定位定向系统。
17、本发明的进一步技术方案是:所述通讯模块采用lora6102pro强抗干扰无线数传模块。
18、有益效果
19、本发明的有益效果在于::
20、(1)本发明目标模拟机器人装置,通过移动底盘、摇臂台组件和定位定向系统分别与控制系统的配合,以摇臂台回转中心做往复运动,实现模拟目标角反射体的调控。
21、(2)本发明提供的目标模拟机器人装置,摇臂台移动速度和角度由人机操控盒下发命令控制。在运动过程中人机操控盒可以随时控制平台停止,速度和位置可以任意组合进行控制,实现平台转动的速度精度和位置精度。
22、(3)本发明提供的目标模拟机器人装置,采用定位定向系统,系统定位误差在1m以内,能精确测出被测试点与测试点的坐标,可计算出雷达到测试设备的夹角,可完成对雷达的距离标定及角分辨率等指标的测量,同时也可以用于基准点标定,减少标定费用,每次约节省标定费用2万元。
23、(4)本发明提供的目标模拟机器人装置,采用轻型履带式遥控底盘车,并带有监控及照明系统,可在夜间及各种复杂路面完成行进要求;也可采用车下模式固定使用,满足高坡等其他恶劣地势使用,最大限度满足生产调试任务。
24、(5)本发明提供的目标模拟机器人装置,采用锂电池及普通电池来提供电力(输出功率≥5w),以减小整体重量并践行了绿色环保设计理念,实现了节能。
技术特征:
1.一种目标模拟机器人装置,其特征在于:包括移动底盘、搭载于其上的摇臂台组件和定位定向模块、以及装置的控制模块和供电模块;
2.根据权利要求1所述一种目标模拟机器人装置,其特征在于:所述摇臂台组件的动力源为伺服电机,所述伺服电机的输出轴通过传动系统与摇臂台连接,驱动摇臂台绕轴旋转;所述长悬臂的固定端安装于摇臂台上,以其中心为零点,由摇臂台带动在水平零面内左右摇摆幅度±40°,误差2~5°。
3.根据权利要求2所述一种目标模拟机器人装置,其特征在于:所述摇臂台通过滑动轴承与移动底盘转动连接,并配合安装有限位装置,用于限制摇臂台旋转超限。
4.根据权利要求3所述一种目标模拟机器人装置,其特征在于:所述限位装置为电限位、机械缓冲或机械限位。
5.根据权利要求1所述一种目标模拟机器人装置,其特征在于:所述长悬臂为叉剪式伸缩结构,通过改变伸缩长度改变长悬臂的长度。
6.根据权利要求1-5任一项所述一种目标模拟机器人装置,其特征在于:所述移动底盘为包括履带式底盘,所述摇臂台通过支架安装于履带式底盘上,支架内安装有伺服电机和齿轮传动组;齿轮传动组的输入端与伺服电机的输出轴连接,其输出端与摇臂台连接。
7.根据权利要求6所述一种目标模拟机器人装置,其特征在于:所述履带式底盘包括远程遥控单元、电池、监控系统、照明系统及阻尼减震器,由远程遥控单元发送控制指令,电池采用锂电池;通过监控系统和照明系统对周围环境进行监测和照明,完成夜间或各种复杂路面的行进;通过其两侧设置的若干阻尼减震器减少行进过程中的震动。
8.根据权利要求7所述一种目标模拟机器人装置,其特征在于:所述摇臂台组件还包括用于位置环检测的光电码盘,及用于速度环检测的测速机进行速度,分别将位置值进而速度反馈值传输至摇臂台控制盒。
9.根据权利要求8所述一种目标模拟机器人装置,其特征在于:所述定位定向模块为hy-gadu501定位定向系统。
10.根据权利要求9所述一种目标模拟机器人装置,其特征在于:所述通讯模块采用lora6102pro强抗干扰无线数传模块。
技术总结
本发明一种目标模拟机器人装置,属于雷达测试技术领域;包括移动底盘、搭载于其上的摇臂台组件和定位定向模块、以及控制模块和供电模块;摇臂台组件包括摇臂台、用于驱动摇臂台旋转的动力源、安装于摇臂转台上的长悬臂、及安装于长悬臂自由端的角反射体;定位定向模块包括安装于摇臂台组件上的天线;控制模块包括摇臂台控制盒、人机操控盒和通讯模块,摇臂台控制盒安装于摇臂台组件上并向其发送控制指令,人机操控盒为地面控制端;通过通讯模块进行摇臂台控制盒和人机操控盒之间的信息交互,即控制信号和反馈信号的传输;供电模块用于装置各部件和模块的供电。本发明解决了传统雷达试验效率低、成本高,及地形对测试机器人的限制等问题。
技术研发人员:张哲,李文学,王军,王磊,吕维,和明磊,李金鑫,元可欣
受保护的技术使用者:西安电子工程研究所
技术研发日:20230623
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!