一种大型零部件形面测量仪的制作方法
本技术涉及污水输送,特别涉及一种大型零部件形面测量仪。
背景技术:
1、形面测量(profile measurement)是一种测量技术,用于测量工件或产品表面的几何形状和参数。与型面测量不同,其主要关注工作表面在一个或多个较窄区域内的特定曲率、角度和偏差等形状信息。
2、三维激光扫描仪是工业中4m以下小型零部件形面测量的常用测量仪器,对于大型零部件,在测量过程中,需要将整个物体分成多个细小区域进行测量,目前现有的激光扫描仪受制于有限的分辨率,在具体部位的细节信息无法准确地进行测量,致使测量的精度很难达到要求。此外,激光跟踪仪是目前大型零部件装配测量的常用测量设备,但是其测量方式为打点式测量,只能测一些标准孔位,平面位置等,无法对形面进行数据采集及测量,基于此,现有的测量设备无法对大型零部件的形面做到精准测量。
技术实现思路
1、本实用新型的主要目的在于提供一种大型零部件形面测量仪,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
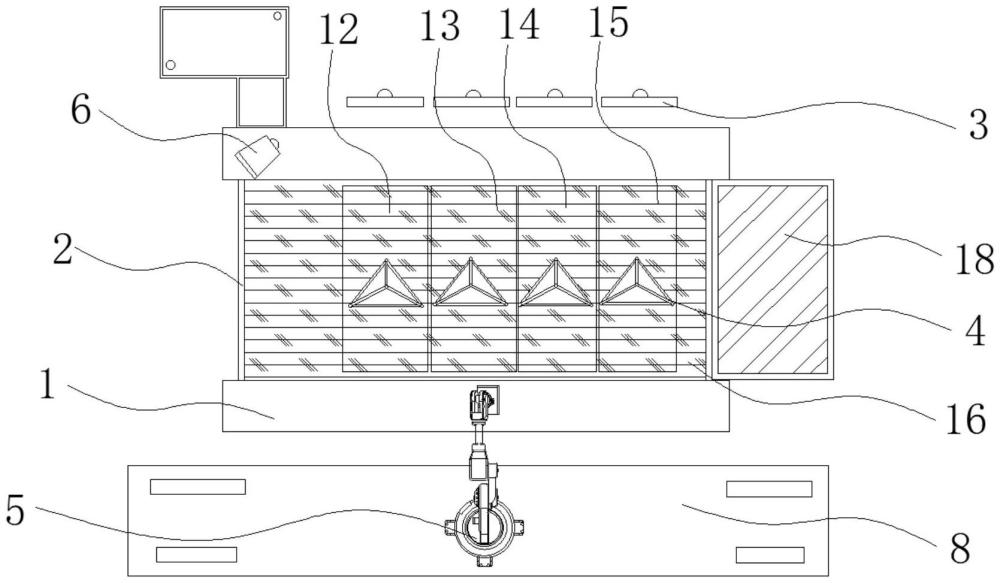
3、一种大型零部件形面测量仪,包括工作台,所述工作台上设置有台面,所述台面分割成四等分的工作区,各所述工作区一侧均对应设置有光学追踪器,各所述工作区上均设置有传送机构,所述传送机构传动运输有检测模块,所述工作台上设置有三维激光扫描仪,所述工作台一侧还设置有激光跟踪仪。
4、优选的,所述检测模块底部设置有限位板。
5、优选的,所述激光跟踪仪底部固定设置有第二安装组件,所述第二安装组件包括安装架,所述安装架顶部螺栓固定有三维激光跟踪仪,位于所述安装架底部设置有万向轮。
6、优选的,所述三维激光扫描仪包括连接板,所述连接板与所述安装架螺栓固定,所述连接板上设置有转动器,位于所述转动器端部设置有扫描头。
7、优选的,所述台面分成四等分的工作区,各所述工作区分别为第一区域、第二区域、第三区域和第四区域,所述光学追踪器设置有四个,各所述光学追踪器分别为第一追踪器、第二追踪器、第三追踪器和第四追踪器。
8、优选的,所述传送机构包括传送带和驱动电机,所述驱动电机用于驱动所述传送带转动。
9、优选的,所述检测模块设置成正四面体,位于所述正四面体端部设置有检测球。
10、优选的,所述激光跟踪仪和三维扫描仪均设置有一个。
11、优选的,所述工作台一侧还设置有收集槽,检测模块可以通过传送带运输至收集槽中收集,在收集槽内壁铺设有防护垫,用于保护检测模块不受破坏。
12、与现有技术相比,本实用新型具有如下有益效果:
13、本实用新型中,通过激光扫描仪和激光跟踪仪对检测模块上的检测球进行坐标转换,即可得到台面高精度的位置数据,将大型零部件置于工作区中,使用三维激光扫描仪进行扫描,扫描采集点云数据使用零部所在工作区矩阵进行空间坐标转换,即可得到高精度的形面数据。
技术特征:
1.一种大型零部件形面测量仪,其特征在于,包括:工作台(1),所述工作台(1)上设置有台面(2),所述台面(2)分割成四等分的工作区,各所述工作区一侧均对应设置有光学追踪器(3),各所述工作区上均设置有传送机构,所述传送机构传动运输有检测模块(4),所述工作台(1)上设置有三维激光扫描仪(6),所述工作台(1)一侧还设置有激光跟踪仪。
2.根据权利要求1所述的一种大型零部件形面测量仪,其特征在于:所述检测模块(4)底部设置有限位板(7)。
3.根据权利要求1所述的一种大型零部件形面测量仪,其特征在于:所述激光跟踪仪底部固定设置有第二安装组件,所述第二安装组件包括安装架(8),所述安装架(8)顶部螺栓固定有三维激光跟踪仪,位于所述安装架(8)底部设置有万向轮。
4.根据权利要求3所述的一种大型零部件形面测量仪,其特征在于:所述三维激光扫描仪(6)包括连接板(9),所述连接板(9)与所述安装架(8)螺栓固定,所述连接板(9)上设置有转动器(10),位于所述转动器(10)端部设置有扫描头(11)。
5.根据权利要求4所述的一种大型零部件形面测量仪,其特征在于:所述台面(2)分成四等分的工作区,各所述工作区分别为第一区域(12)、第二区域(13)、第三区域(14)和第四区域(15),所述光学追踪器(3)设置有四个,各所述光学追踪器(3)分别为第一追踪器、第二追踪器、第三追踪器和第四追踪器。
6.根据权利要求5所述的一种大型零部件形面测量仪,其特征在于:所述传送机构包括传送带(16)和驱动电机,所述驱动电机用于驱动所述传送带(16)转动。
7.根据权利要求2所述的一种大型零部件形面测量仪,其特征在于:所述检测模块(4)设置成正四面体,位于所述正四面体端部设置有检测球(17)。
8.根据权利要求7所述的一种大型零部件形面测量仪,其特征在于:所述激光跟踪仪和三维扫描仪均设置有一个。
9.根据权利要求8所述的一种大型零部件形面测量仪,其特征在于:所述工作台(1)一侧还设置有收集槽(18)。
技术总结
本技术公开了一种大型零部件形面测量仪,包括工作台,所述工作台上设置有台面,所述台面分割成四等分的工作区,各所述工作区一侧均对应设置有光学追踪器,各所述工作区上均设置有传送机构,所述传送机构传动运输有检测模块,所述工作台上设置有三维激光扫描仪,所述工作台一侧还设置有激光跟踪仪。本技术中,通过激光扫描仪和激光跟踪仪对检测模块上的检测球进行坐标转换,即可得到台面高精度的位置数据,将大型零部件置于工作区中,使用三维激光扫描仪进行扫描,扫描采集点云数据使用零部所在工作区矩阵进行空间坐标转换,即可得到高精度的形面数据。
技术研发人员:朱文雄,朱晙,陈昌敏
受保护的技术使用者:上海三准仪器设备有限公司
技术研发日:20230710
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!