一种共光路的激光雷达系统
本技术涉及激光雷达。更具体地,涉及一种共光路的激光雷达系统。
背景技术:
1、现有激光雷达的核心器件为深度传感器,主要提供距离信息。然而,在实际应用中通常还需要rgb可见光图像信息,一般会单独配备一个采集可见光图像的系统,可见光灰度数据和深度数据通过单个传感器采集,生成可见光图像和深度图像。这种方案体积较大,两套系统视场不一致,且影响数据的采集速度,大大降低成像帧率。
技术实现思路
1、本实用新型的目的在于提供一种共光路的激光雷达系统,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本实用新型采用下述技术方案:
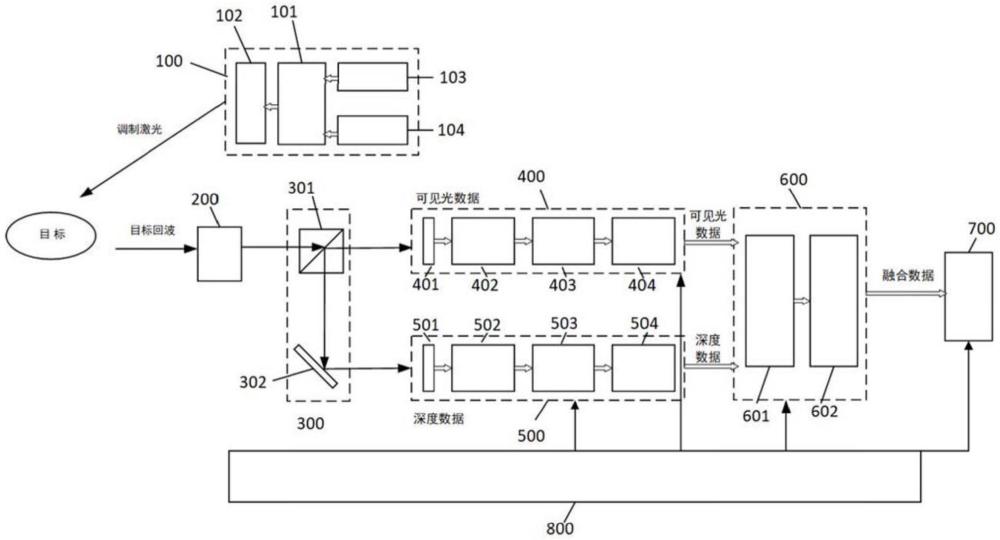
3、本实用新型第一方面提供了一种共光路的激光雷达系统,该系统包括
4、激光发射模块,用于响应于驱动与调制信号发射激光,并对所述激光整形后照射至待测目标;
5、激光接收模块,用于接收所述待测目标产生的目标回波得到双波段光束;
6、分光与指向调节模块,用于接收所述双波段光束并进行分光处理得到第一光束和第二光束,并将所述第一光束和所述第二光束分别传输至第一光路和第二光路;
7、可见光传感器模块,用于沿所述第一光路采集所述第一光束并进行处理得到可见光数据;
8、深度传感器模块,用于沿所述第二光路采集所述第二光束并进行处理得到深度数据;
9、融合模块,用于对所述可见光数据和所述深度数据并行处理得到伪彩色的三维图像。
10、可选地,所述激光发射模块包括激光器、激光整形单元、激光驱动与调制单元和温度控制单元;其中
11、所述激光驱动与调制单元,用于对所述激光器发送驱动与调制信号;
12、所述激光器,用于接收所述驱动与调制信号并发射激光;
13、所述温度控制单元,用于发送温度控制信号至所述激光器并进行温度控制;
14、所述激光整形单元,用于接收所述激光并整形为激光照明所需的光束。
15、可选地,所述激光接收模块包括匹配可见光波段传感器和红外光波段传感器的成像镜头,且所述成像镜头的接收视场大于所述激光照明的视场。
16、可选地,所述分光与指向调节模块包括设置在所述双波段光束的光路上的分光单元,以及与所述分光单元垂直设置的光束指向调节单元;其中
17、所述分光单元,用于对所述双波段光束进行分光处理得到第一光束和第二光束,并将所述第一光束沿所述第一光路透射传输至所述可见光传感器模块;
18、所述光束指向调节单元,用于接收所述第二光束并将所述第二光束沿所述第二光路反射传输至所述深度传感器模块。
19、可选地,所述可见光传感器模块包括沿所述第一光路设置的第一滤光单元、可见光传感器、可见光数据采集单元和可见光数据处理单元;其中
20、所述第一滤光单元,用于接收所述第一光束并选定第一波段的光束通过;
21、所述可见光传感器,用于根据所述第一波段的光束得到可见光彩色图像;
22、所述可见光数据采集单元,用于将所述可见光彩色图像进行处理得到第一电信号;
23、所述可见光数据处理单元,用于接收所述第一电信号并进行数据处理得到所述可见光数据。
24、可选地,所述深度传感器模块包括沿所述第二光路设置的第二滤光单元、深度传感器、深度数据采集单元和深度数据处理单元;其中
25、所述第二滤光单元,用于接收所述第二光束并选定第二波段的光束通过;
26、所述深度传感器,用于根据所述第二波段的光束得到深度图像;
27、所述深度数据采集单元,用于将所述深度图像进行处理得到第二电信号;
28、所述深度数据处理单元,用于接收所述第二电信号并进行数据处理得到所述深度数据。
29、可选地,所述融合模块包括依次设置的双模图像融合单元和融合图像处理单元;其中
30、所述双模图像融合单元,用于接收并对所述可见光数据和所述深度数据进行并行处理得到融合数据;
31、所述融合图像处理单元,用于对所述融合数据进行处理生成伪彩色的三维图像。
32、可选地,该系统还包括
33、数据输出模块,用于将各种数据通过外部接口对外传输;
34、控制模块,用于对所述各种数据进行存储和分析,并各模块进行控制。
35、可选地,所述深度传感器的像元尺寸大于所述可见光传感器的像元尺寸。
36、可选地,所述深度传感器的像元尺寸是所述可见光传感器的整数倍。
37、本实用新型的有益效果如下:
38、本实用新型提供了一种共光路的激光雷达系统,该系统结构简单,通过共光路和同视场角的光学结构,保证深度图像与可见光图像的成像视场一致,解决了双传感器成像视场的不一致问题;同时保证二维图像和三维图像的在空间和时间上同步,降低后续配准和融合等复杂处理工作的难度。
技术特征:
1.一种共光路的激光雷达系统,其特征在于,该系统包括
2.根据权利要求1所述的共光路的激光雷达系统,其特征在于,
3.根据权利要求2所述的共光路的激光雷达系统,其特征在于,
4.根据权利要求3所述的共光路的激光雷达系统,其特征在于,
5.根据权利要求4所述的共光路的激光雷达系统,其特征在于,
6.根据权利要求5所述的共光路的激光雷达系统,其特征在于,
7.根据权利要求6所述的共光路的激光雷达系统,其特征在于,
8.根据权利要求7所述的共光路的激光雷达系统,其特征在于,该系统还包括
9.根据权利要求8所述的共光路的激光雷达系统,其特征在于,
10.根据权利要求9所述的共光路的激光雷达系统,其特征在于,
技术总结
本技术实施例公开一种共光路的激光雷达系统。该系统包括激光发射模块,响应于驱动与调制信号发射激光,并对激光整形后照射至待测目标;激光接收模块,接收待测目标产生的目标回波得到双波段光束;分光与指向调节模块,接收双波段光束并进行分光处理得到第一光束和第二光束,并将第一光束和第二光束分别传输至第一光路和第二光路;可见光传感器模块,沿第一光路采集第一光束并进行处理得到可见光数据;深度传感器模块,沿第二光路采集第二光束并进行处理得到深度数据;融合模块,对可见光数据和深度数据并行处理得到伪彩色的三维图像。通过共光路和同视场角的光学结构,保证深度图像与可见光图像的成像视场一致和在空间和时间上同步。
技术研发人员:张硕,毕勇
受保护的技术使用者:中国科学院理化技术研究所
技术研发日:20230721
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!