一种基于IMU模块的惯性测量装置的制作方法
本技术涉及一种惯性测量装置,尤其是涉及一种基于imu模块的惯性测量装置。
背景技术:
1、当今自动驾驶的推动下,惯性测量单元(imu)是一种重要的传感器之一,出现在许多自动驾驶车辆和无人驾驶飞行器中。imu的主要作用是测量车辆/飞行器的加速度和角速度,以获得飞行器或车辆在三维空间中的精确位置和方向。
2、目前的imu模块使用ttl电平的串口通信,其通信距离较短,抗干扰能力较弱。相较于普通的小汽车、无人驾驶飞行器,一些场景如卡车等对于imu数量的需求由1pcs上升的3pcs以上,每个imu都需要放置在卡车前后不同的位置,通信距离更远,干扰更加严重,现有的imu模块无法满足要求。因此,希望有一种技术方案来解决现有技术的上述不足,满足长距离通信的需求。
技术实现思路
1、本实用新型提供了一种基于imu模块的惯性测量装置,解决了现有imu模块无法满足长距离通信的问题,其技术方案如下所述:
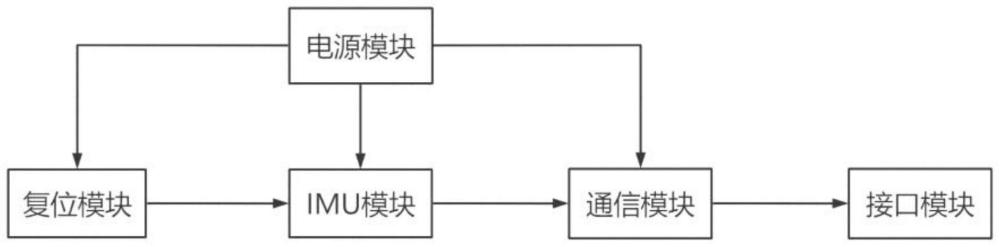
2、一种基于imu模块的惯性测量装置,包括imu模块、电源模块、复位模块、通信模块和接口模块,所述复位模块是上位机用来控制imu模块进行复位,所述通信模块是将imu模块的ttl电平信号转换为rs422信号,并通过接口模块与上位机进行通信,所述电源模块用于向imu模块、复位模块、通信模块供电,所述imu模块包括m-g365芯片及其外围电路,内部设置有三轴陀螺仪及三轴加速度计等传感器。
3、所述m-g365芯片通过电阻r28、电容c31对复位引脚进行默认上拉的配置,通过并联设置的电容c18、c19、c20对3.3v电源滤波后对芯片供电。
4、所述电源模块包括第一电压模块电路,输出的第一工作电压为5v;还包括第二电压模块电路,输出的第二工作电压为3.3v。
5、所述第一电压模块电路包括lgs5148芯片,输入端通过tvs管d1,然后通过并联设置的电解电容c9、贴片电容c6、c7接地滤波,其输出端通过电感l1输出第一工作电压,并通过电容c2、c5稳压滤波。
6、所述第二电压模块电路包括ams1117-3.3芯片um1,其输入端通过贴片电容c3、c4接地,其输出端分别通过电容c13、电容c14接地。
7、所述复位模块包括sgm811芯片u5,输入端通过r23、c24实现电平上拉,并通过d3与上位机控制复位信号单向连接,通过r22输出复位信号与imu模块相连,实现上位机无输出或输出高电平时,u5能够输出高电平信号,当上位机输出低电平时,u5输出低电平信号。
8、所述通信模块包括sn74lvc2t45芯片u4以实现电平转换,和max490esa+t芯片u6实现ttl转rs422的通信协议。
9、所述max490esa+t芯片u6通过pin7\pin8接收差分rs422信号,从pin2通过r11输出rx信号;还从pin3通过r13输入tx信号,从pin5\pin6输出差分rs422信号。
10、所述sn74lvc2t45芯片u4从r19、r25分别输入上位机给到的pps信号及u6的rx信号,其高电平都为5v,从r20、r29输出对应的信号,其高电平都为3.3v。
11、根据权利要求1所述的基于imu模块的惯性测量装置,其特征在于:所述接口模块电路为一个8pin间距1.5mm的座子,与上位机连接。
12、所述基于imu模块的惯性测量装置,通过复位电路实现了上位机对imu模块的操作,通过接口模块及通信模块确保了与imu模块的长距离通信可靠性,满足了长距离通信的需求。
技术特征:
1.一种基于imu模块的惯性测量装置,其特征在于:包括imu模块、电源模块、复位模块、通信模块和接口模块,所述复位模块是上位机用来控制imu模块进行复位,所述通信模块是将imu模块的ttl电平信号转换为rs422信号,并通过接口模块与上位机进行通信,所述电源模块用于向imu模块、复位模块、通信模块供电,所述imu模块包括m-g365芯片及其外围电路,内部设置有三轴陀螺仪及三轴加速度计等传感器。
2.根据权利要求1所述的基于imu模块的惯性测量装置,其特征在于:所述m-g365芯片通过电阻r28、电容c31对复位引脚进行默认上拉的配置,通过并联设置的电容c18、c19、c20对3.3v电源滤波后对芯片供电。
3.根据权利要求1所述的基于imu模块的惯性测量装置,其特征在于:所述电源模块包括第一电压模块电路,输出的第一工作电压为5v;还包括第二电压模块电路,输出的第二工作电压为3.3v。
4.根据权利要求3所述的基于imu模块的惯性测量装置,其特征在于:所述第一电压模块电路包括lgs5148芯片,输入端通过tvs管d1,然后通过并联设置的电解电容c9、贴片电容c6、c7接地滤波,其输出端通过电感l1输出第一工作电压,并通过电容c2、c5稳压滤波。
5.根据权利要求3所述的基于imu模块的惯性测量装置,其特征在于:所述第二电压模块电路包括ams1117-3.3芯片um1,其输入端通过贴片电容c3、c4接地,其输出端分别通过电容c13、电容c14接地。
6.根据权利要求1所述的基于imu模块的惯性测量装置,其特征在于:所述复位模块包括sgm811芯片u5,输入端通过r23、c24实现电平上拉,并通过d3与上位机控制复位信号单向连接,通过r22输出复位信号与imu模块相连,实现上位机无输出或输出高电平时,u5能够输出高电平信号,当上位机输出低电平时,u5输出低电平信号。
7.根据权利要求1所述的基于imu模块的惯性测量装置,其特征在于:所述通信模块包括sn74lvc2t45芯片u4以实现电平转换,和max490esa+t芯片u6实现ttl转rs422的通信协议。
8.根据权利要求7所述的基于imu模块的惯性测量装置,其特征在于:所述max490esa+t芯片u6通过pin7\pin8接收差分rs422信号,从pin2通过r11输出rx信号;还从pin3通过r13输入tx信号,从pin5\pin6输出差分rs422信号。
9.根据权利要求7所述的基于imu模块的惯性测量装置,其特征在于:所述sn74lvc2t45芯片u4从r19、r25分别输入上位机给到的pps信号及u6的rx信号,其高电平都为5v,从r20、r29输出对应的信号,其高电平都为3.3v。
10.根据权利要求1所述的基于imu模块的惯性测量装置,其特征在于:所述接口模块电路为一个8pin间距1.5mm的座子,与上位机连接。
技术总结
本技术提供一种基于IMU模块的惯性测量装置,包括IMU模块、电源模块、复位模块、通信模块和接口模块,所述复位模块是上位机用来控制IMU模块进行复位,所述通信模块是将IMU模块的TTL电平信号转换为RS422信号,并通过接口模块与上位机进行通信,所述电源模块用于向IMU模块、复位模块、通信模块供电,所述IMU模块包括M‑G365芯片及其外围电路,内部设置有三轴陀螺仪及三轴加速度计等传感器。本技术通过复位电路实现了上位机对IMU模块的操作,通过接口模块及通信模块确保了与IMU模块的长距离通信可靠性,满足了长距离通信的需求。
技术研发人员:喻宇西,黄熠培,罗松
受保护的技术使用者:深圳卡睿智行科技有限公司
技术研发日:20230803
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!