拖拉机下提升臂多自由度测试工装的制作方法
本技术涉及测试工装领域,尤其是拖拉机下提升臂多自由度测试工装。
背景技术:
1、拖拉机是一种用于牵引和驱动作业机械完成各项移动式作业的自走式动力机,也可做固定作业动力,拖拉机由发动机、底盘和电器设备三大部分组成。按功能和用途分为农业、工业和特殊用途等拖拉机;按结构类型又分为轮式、履带式、船形和自走底盘等拖拉机,拖拉机在使用的过程中需要利用到提升臂,提升臂起到牵引的作用,提升臂在使用的过程中,需要对其负荷强度进行测试,而现有的测试工装功能较为单一,灵活度较差,无法进行多角度的转向测试,实用性较低。
2、为此,我们提出拖拉机下提升臂多自由度测试工装解决上述问题。
技术实现思路
1、本实用新型的目的在于提供拖拉机下提升臂多自由度测试工装,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
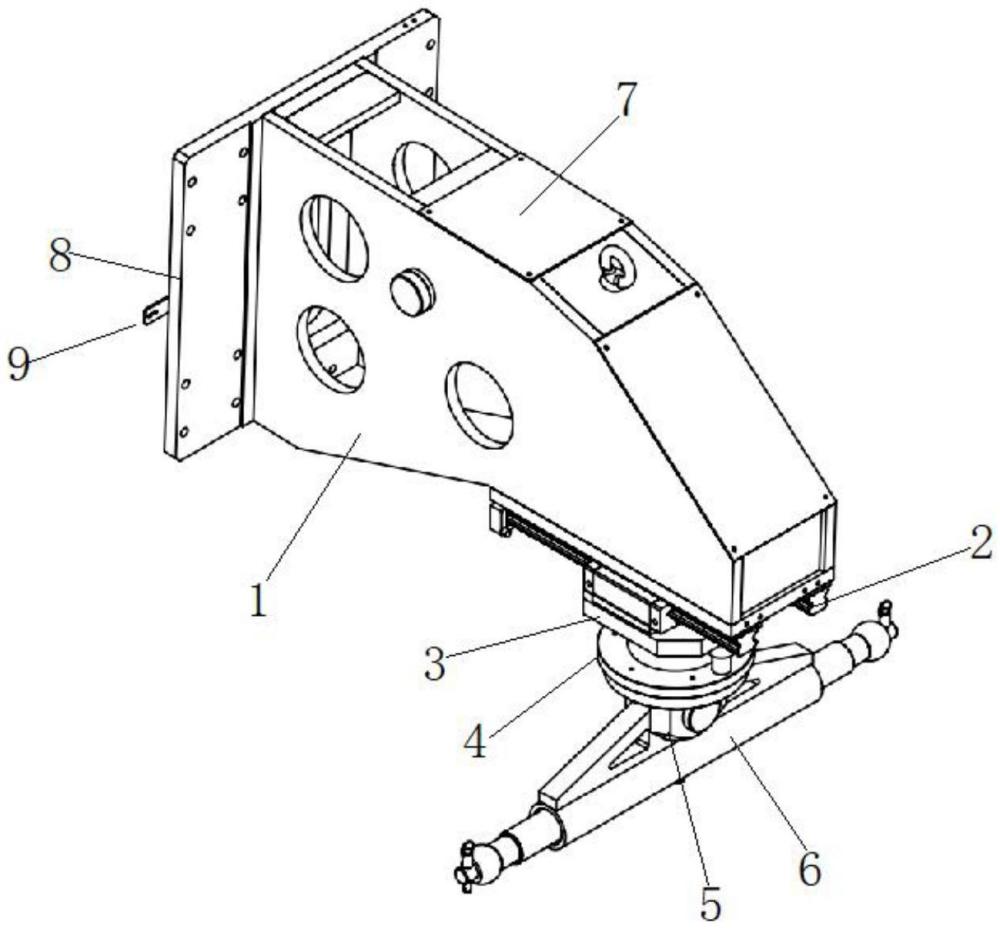
3、拖拉机下提升臂多自由度测试工装,包括提升支架,所述提升支架的底面安装有两个直线导轨,两个所述直线导轨的底面共同固定连接有提升连接板,所述提升连接板的底面镶嵌有推力球轴承,所述推力球轴承的内圈固定连接有浮动接头,所述浮动接头的底端固定连接有压盘盖,所述压盘盖的底面安装有压头铰链,所述压头铰链的外表面安装有压头接板,所述压盘盖的上表面安装有压力传感器,所述提升支架的背面安装有液压缸接头销。
4、在进一步的实施例中,所述提升支架的上表面固定连接有吊环,所述吊环的直径为六十五毫米。
5、在进一步的实施例中,所述提升支架的左侧面固定连接有提升安装板,所述提升安装板的右侧面开设有安装孔。
6、在进一步的实施例中,所述提升支架的内壁固定连接有提升机护板,所述提升支架的上表面固定连接有方形提升机护罩,所述提升支架的右侧面固定连接有矩形提升机护罩。
7、在进一步的实施例中,所述提升安装板的左侧面固定连接有拖链连接件,所述拖链连接件的材质为q二三五钢。
8、在进一步的实施例中,所述提升支架的内壁开设有圆形穿插孔,所述圆形穿插孔的数量为六个。
9、与现有技术相比,本实用新型的有益效果是:
10、本装置采用的是多自由度并联测试,通过在提升支架上设置直线导轨并以推力球轴承和浮动接头带动压盘盖自由度的动作,能够模拟出对待测提升臂各个方向的加载力,从而进行多自由度的提升臂疲劳试验,在测试时可通过压力传感器记录下提升臂实际使用时的工况谱线,然后通过该并联平台按谱线模拟测试,尽最大可能模拟实际工况,得到更接近实际的疲劳寿命数据。
技术特征:
1.拖拉机下提升臂多自由度测试工装,其特征在于:包括提升支架(1),所述提升支架(1)的底面安装有两个直线导轨(2),两个所述直线导轨(2)的底面共同固定连接有提升连接板(3),所述提升连接板(3)的底面镶嵌有推力球轴承(10),所述推力球轴承(10)的内圈固定连接有浮动接头(14),所述浮动接头(14)的底端固定连接有压盘盖(4),所述压盘盖(4)的底面安装有压头铰链(5),所述压头铰链(5)的外表面安装有压头接板(6),所述压盘盖(4)的上表面安装有压力传感器(17),所述提升支架(1)的背面安装有液压缸接头销(15)。
2.根据权利要求1所述的拖拉机下提升臂多自由度测试工装,其特征在于:所述提升支架(1)的上表面固定连接有吊环(11),所述吊环(11)的直径为六十五毫米。
3.根据权利要求1所述的拖拉机下提升臂多自由度测试工装,其特征在于:所述提升支架(1)的左侧面固定连接有提升安装板(8),所述提升安装板(8)的右侧面开设有安装孔。
4.根据权利要求1所述的拖拉机下提升臂多自由度测试工装,其特征在于:所述提升支架(1)的内壁固定连接有提升机护板(12),所述提升支架(1)的上表面固定连接有方形提升机护罩(7),所述提升支架(1)的右侧面固定连接有矩形提升机护罩(13)。
5.根据权利要求3所述的拖拉机下提升臂多自由度测试工装,其特征在于:所述提升安装板(8)的左侧面固定连接有拖链连接件(9),所述拖链连接件(9)的材质为q二三五钢。
6.根据权利要求1所述的拖拉机下提升臂多自由度测试工装,其特征在于:所述提升支架(1)的内壁开设有圆形穿插孔(16),所述圆形穿插孔(16)的数量为六个。
技术总结
本技术公开了拖拉机下提升臂多自由度测试工装,包括提升支架,所述提升支架的底面安装有两个直线导轨,两个所述直线导轨的底面共同固定连接有提升连接板,所述提升连接板的底面镶嵌有推力球轴承,所述推力球轴承的内圈固定连接有浮动接头,所述浮动接头的底端固定连接有压盘盖。本装置采用的是多自由度并联测试,通过在提升支架上设置直线导轨并以推力球轴承和浮动接头带动压盘盖自由度的动作,能够模拟出对待测提升臂各个方向的加载力,从而进行多自由度的提升臂疲劳试验,在测试时可通过压力传感器记录下提升臂实际使用时的工况谱线,然后通过该并联平台按谱线模拟测试,尽最大可能模拟实际工况,得到更接近实际的疲劳寿命数据。
技术研发人员:李娜,仇浩义,石岩
受保护的技术使用者:天津德明福自动化技术有限公司
技术研发日:20230810
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!