一种机器视觉高精度目标定位装置
本技术涉及机器视觉定位,尤其涉及一种机器视觉高精度目标定位装置。
背景技术:
1、随着工业自动化的快速发展,机器视觉技术在机械零件等工件加工领域中扮演着越来越重要的角色。机器视觉的定位装置包括摄像机构,传统的摄像机构往往因为工厂车间光照条件不稳定、设备自身的阴影遮挡工件等因素而摄取到模糊的工件图像,从而无法得出准确的目标定位信息,这种情况给后续的工件加工过程带来了不便。
技术实现思路
1、本实用新型的目的是提供一种机器视觉高精度目标定位装置,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、本实用新型的目的采用如下技术方案实现:
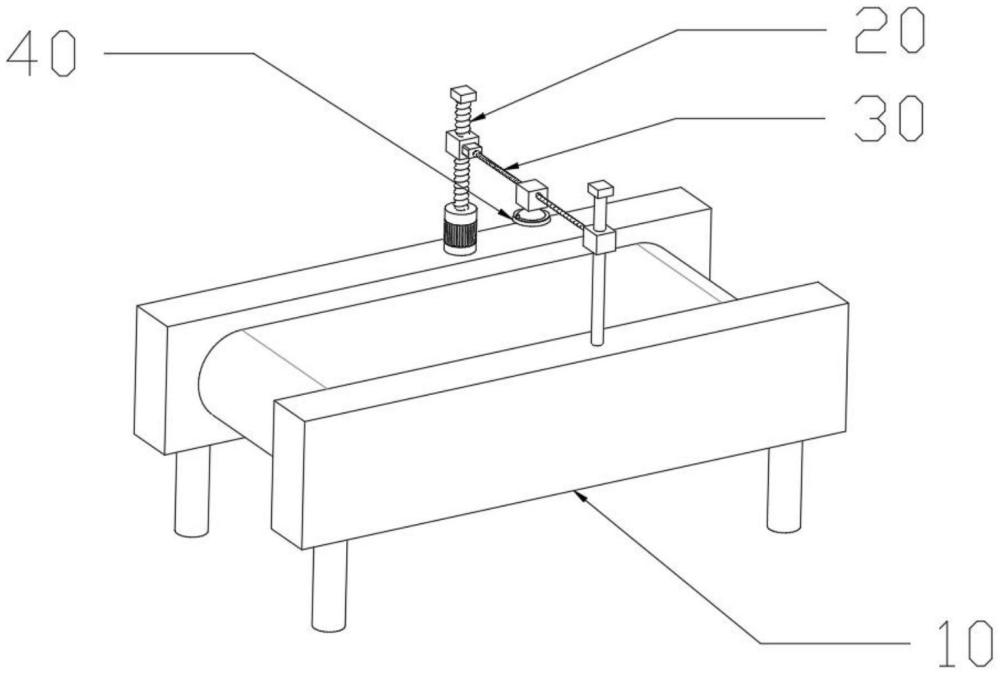
3、一种机器视觉高精度目标定位装置,包括输送平台及设置于输送平台上的升降机构、水平位移机构和无影摄像机构;
4、所述输送平台用于传输工件;
5、所述升降机构用于控制所述水平位移机构升降;
6、所述水平位移机构用于控制所述无影摄像机构水平移动;
7、所述无影摄像机构用于均匀照亮工件表面并摄取工件的图像。
8、进一步地,所述升降机构包括第一电机、第一丝杆、第一升降块、导向杆和第二升降块;
9、所述第一电机和所述导向杆相互对称地固定设置在所述输送平台的边缘处;
10、所述第一丝杆通过传动机构固定连接所述第一电机的输出轴;
11、所述第一升降块螺纹连接所述第一丝杆;
12、所述第二升降块套接所述导向杆;
13、所述水平位移机构固定设置在所述第一升降块和所述第二升降块之间。
14、进一步地,所述升降机构还包括第一限位块;
15、所述第一限位块用于限制所述第一升降块的运动行程。
16、进一步地,所述升降机构还包括第二限位块;
17、所述第二限位块用于限制所述第二升降块的运动行程。
18、进一步地,所述水平位移机构包括第二电机、第二丝杆和水平位移块;
19、所述第二电机固定设置在所述第一升降块上;
20、所述第二丝杆的一端通过传动机构固定连接所述第二电机的输出轴;
21、所述水平位移块螺纹连接所述第二丝杆;
22、所述第二丝杆的另一端通过轴承转动连接所述第二升降块;
23、所述无影摄像机构固定连接所述水平位移块。
24、进一步地,所述无影摄像机构包括外壳;
25、所述外壳的顶部固定设置有螺纹连接部;
26、所述水平位移块的底部开设有螺纹孔;
27、所述螺纹连接部螺纹连接所述螺纹孔。
28、进一步地,所述外壳的顶面固定设置有转动环,用于安装或拆卸所述无影摄像机构。
29、进一步地,所述无影摄像机构还包括机器视觉摄像机和无影灯;
30、所述机器视觉摄像机固定设置在所述外壳底部,用于摄取工件的图像;
31、所述无影灯固定设置在所述机器视觉摄像机的外周,用于均匀照亮工件表面。
32、进一步地,所述外壳的顶部固定设置有一调光控制器;
33、所述调光控制器贯穿所述外壳固定连接所述无影灯,用于调节所述无影灯的光照范围。
34、相比现有技术,本实用新型的有益效果在于:
35、本实用新型通过设置在输送平台上的无影摄像机构,能够均匀照亮工件表面,减轻光照条件不稳定、设备自身的阴影遮挡工件等因素导致的工件图像模糊的问题,使机器视觉系统能够更精确地检测并定位目标工件,方便工件的后续加工。
技术特征:
1.一种机器视觉高精度目标定位装置,其特征在于:包括输送平台及设置于输送平台上的升降机构、水平位移机构和无影摄像机构;
2.如权利要求1所述的一种机器视觉高精度目标定位装置,其特征在于:所述升降机构包括第一电机、第一丝杆、第一升降块、导向杆和第二升降块;
3.如权利要求2所述的一种机器视觉高精度目标定位装置,其特征在于:所述升降机构还包括第一限位块;
4.如权利要求2所述的一种机器视觉高精度目标定位装置,其特征在于:所述升降机构还包括第二限位块;
5.如权利要求2所述的一种机器视觉高精度目标定位装置,其特征在于:所述水平位移机构包括第二电机、第二丝杆和水平位移块;
6.如权利要求5所述的一种机器视觉高精度目标定位装置,其特征在于:所述无影摄像机构包括外壳;
7.如权利要求6所述的一种机器视觉高精度目标定位装置,其特征在于:所述外壳的顶面固定设置有转动环,用于安装或拆卸所述无影摄像机构。
8.如权利要求6所述的一种机器视觉高精度目标定位装置,其特征在于:所述无影摄像机构还包括机器视觉摄像机和无影灯;
9.如权利要求8所述的一种机器视觉高精度目标定位装置,其特征在于:所述外壳的顶部固定设置有一调光控制器;
技术总结
本技术公开了一种机器视觉高精度目标定位装置,包括输送平台及设置于输送平台上的升降机构、水平位移机构和无影摄像机构;输送平台用于传输工件;升降机构用于控制水平位移机构升降;水平位移机构用于控制无影摄像机构水平移动;无影摄像机构用于均匀照亮工件表面并摄取工件的图像。本技术通过设置在输送平台上的无影摄像机构,能够均匀照亮工件表面,减轻光照条件不稳定、设备自身的阴影遮挡工件等因素导致的工件图像模糊的问题,使机器视觉系统能够更精确地检测并定位目标工件,方便工件的后续加工。
技术研发人员:张世奇,张磊,张鑫骏,郑仕县,朱家燏,漆宇欣
受保护的技术使用者:湖北工业大学工程技术学院
技术研发日:20230818
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!