一种小体积嵌入式双目激光3D视觉传感器的制作方法
本技术涉及视觉传感器,具体为一种小体积嵌入式双目激光3d视觉传感器。
背景技术:
1、随着经济的发展与科技的进步,人们越来越多地将自动化技术应用到生产与生活之中,相应地也对自动化技术提出了更高的要求。最近几年,工业生产自动化的普及使得工业机器人得到了广泛的应用及关注。机器人集成视觉系统已经成为一种广泛趋势,利用视觉技术实现检测,识别,定位等功能,为机器人提供必要的运动信息。
2、3d视觉传感器的工作原理为通过工业相机来采集数据,在机器人自动化领域,3d视觉技术得到了越来越广泛的应用。实际现场使用中,当工况复杂的情况需要将3d视觉传感器安装到机器人末端,灵活采集数据给出定位信息或者提供机器人运行信息,常规的视物显大症野传感器往往体积大重量大,无法安装到机械臂末端;当工件规格尺寸较小或者对定位精度要求非常高的情况下,常规的视物显大症野传感器往往精度难以满足要求;随着工业场景自动化程度的提高,越来越多的复合型机器人出现,形式往往是运动平台上搭载协作机械臂,机械臂末端安装3d传感器,复合型机器人更加灵活,应用场景更加广泛。因此市场上出现了一些小体积的3d视觉传感器,该小体积的3d视觉传感器方便安装在机械臂的末端,但是在实际使用的过程中出现现有的小体积3d视觉传感器不方便根据使用需求沿机械臂末端弧面进行调节,从而导致一些3d视觉传感器不能够采集到工件被机械臂遮挡的部分,不便于3d视觉传感器的灵活使用。
技术实现思路
1、本实用新型的目的在于提供一种小体积嵌入式双目激光3d视觉传感器,旨在改善现有的小体积3d视觉传感器不方便根据使用需求沿机械臂末端弧面进行调节,从而导致一些3d视觉传感器不能够采集到工件被机械臂遮挡的部分,不便于3d视觉传感器灵活使用的问题。
2、本实用新型是这样实现的:
3、一种小体积嵌入式双目激光3d视觉传感器,包括机壳和相机,所述机壳内部设有主板,所述主板后端设有嵌入式模块,且所述主板前端设有激光器,所述主板一侧设有电机控制器,所述相机对称安装在机壳内部两侧,所述机壳底部设有滑块,且所述机壳下方设有两个弧形导向板,所述弧形导向板一侧面设有齿圈,且两个所述弧形导向板通过螺栓连接并形成环状的导向组件,所述滑块卡合在弧形导向板内侧,所述机壳底部安装有驱动电机,所述驱动电机输出端设有齿轮,所述齿轮和齿圈啮合在一起。
4、优选的,所述相机底部设有安装板,所述安装板上设有多个螺栓孔。
5、优选的,所述弧形导向板未设有齿圈的一侧均设有第一连接板,所述第一连接板上设有若干第一连接孔,所述齿圈朝向外部的一侧两端均设有第二连接板,所述第二连接板中部设有第二连接孔。
6、优选的,所述弧形导向板中部设有导向槽,所述导向槽的横截面为t型。
7、优选的,所述驱动电机顶部设有固定板,所述固定板两端均设有若干固定孔。
8、优选的,所述驱动电机朝向外侧的一端设有导线,所述导线端部设有插接头。
9、与现有技术相比,本实用新型的有益效果是:
10、1、在3d视觉传感器底部安装弧形导向板,两个弧形导向板可以卡合安装在机械臂末端,且弧形导向板一侧设有齿圈,3d视觉传感器底部设有电机,电机输出端设有齿轮和齿圈啮合。3d视觉传感器和弧形导向板卡合在一起并在电机的驱动下能够沿机械臂的弧面进行转动,方便根据使用需求驱动3d视觉传感器,有效地提高了3d视觉传感器的使用灵活性。
11、2、两个弧形导向板之间通过螺栓连接,方便根据使用需求快速地拆装弧形导向板以及3d视觉传感器,便于3d视觉传感器灵活地配合机械臂使用。
技术特征:
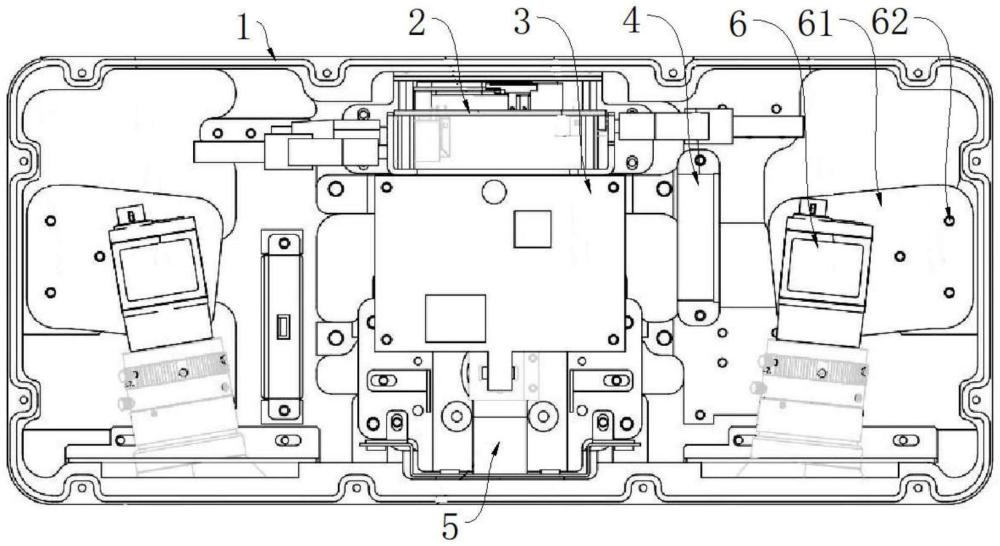
1.一种小体积嵌入式双目激光3d视觉传感器,包括机壳(1)和相机(6),所述机壳(1)内部设有主板(3),所述主板(3)后端设有嵌入式模块(2),且所述主板(3)前端设有激光器(5),所述主板(3)一侧设有电机控制器(4),所述相机(6)对称安装在机壳(1)内部两侧,其特征在于,所述机壳(1)底部设有滑块(11),且所述机壳(1)下方设有两个弧形导向板(7),所述弧形导向板(7)一侧面设有齿圈(74),且两个所述弧形导向板(7)通过螺栓连接并形成环状的导向组件,所述滑块(11)卡合在弧形导向板(7)内侧,所述机壳(1)底部安装有驱动电机(8),所述驱动电机(8)输出端设有齿轮(83),所述齿轮(83)和齿圈(74)啮合在一起。
2.根据权利要求1所述的一种小体积嵌入式双目激光3d视觉传感器,其特征在于,所述相机(6)底部设有安装板(61),所述安装板(61)上设有多个螺栓孔(62)。
3.根据权利要求1所述的一种小体积嵌入式双目激光3d视觉传感器,其特征在于,所述弧形导向板(7)未设有齿圈(74)的一侧均设有第一连接板(71),所述第一连接板(71)上设有若干第一连接孔(72),所述齿圈(74)朝向外部的一侧两端均设有第二连接板(75),所述第二连接板(75)中部设有第二连接孔(76)。
4.根据权利要求3所述的一种小体积嵌入式双目激光3d视觉传感器,其特征在于,所述弧形导向板(7)中部设有导向槽(73),所述导向槽(73)的横截面为t型。
5.根据权利要求1所述的一种小体积嵌入式双目激光3d视觉传感器,其特征在于,所述驱动电机(8)顶部设有固定板(81),所述固定板(81)两端均设有若干固定孔(82)。
6.根据权利要求5所述的一种小体积嵌入式双目激光3d视觉传感器,其特征在于,所述驱动电机(8)朝向外侧的一端设有导线(84),所述导线(84)端部设有插接头(85)。
技术总结
本技术公开了一种小体积嵌入式双目激光3D视觉传感器,包括机壳和相机,所述机壳内部设有主板,所述主板后端设有嵌入式模块,且所述主板前端设有激光器,所述主板一侧设有电机控制器,所述相机对称安装在机壳内部两侧,所述机壳底部设有滑块,且所述机壳下方设有两个弧形导向板,所述弧形导向板一侧面设有齿圈,且两个所述弧形导向板通过螺栓连接并形成环状的导向组件,所述滑块卡合在弧形导向板内侧,所述机壳底部安装有电机,所述电机输出端设有齿轮,所述齿轮和齿圈啮合在一起。3D视觉传感器和弧形导向板卡合在一起并在电机的驱动下能够沿机械臂的弧面进行转动,方便根据使用需求驱动3D视觉传感器,有效地提高了3D视觉传感器的使用灵活性。
技术研发人员:陈鹏,孟万利,李杰,刘源
受保护的技术使用者:河南埃尔森智能科技有限公司
技术研发日:20230904
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!