一种医疗机器人精度测试工装的制作方法
本技术涉及医疗领域,具体是一种医疗机器人精度测试工装。
背景技术:
1、医疗机器人辅助的微创化高精准度的手术,已经是当前的热门研究的热门领域,各种不同治疗用途的机器人正在被各大公司研发。
2、觉大多数手术机器人(如骨科,穿刺介入)的使用过程可分为系统注册,运动规划和手术执行3个过程,系统精度是判定医疗机器人执行结果好坏的依据。
3、针对视觉引导的手术机器人系统,针对其系统精度有一套推荐的测试标准和共识,但是对于其他类型引导,如超声引导的医疗机器人系统,目前并没有一种公开的好的测试方案和工装来进行系统精度测试的实施。
4、超声引导的机器人系统具有天然优势,具有辐射低,适用性强,范围广的优势,远程超声机器人,超声引导的精准介入穿刺机器人目前正在各个科室被广泛的开发和使用。
5、由于技术方案的选择和基于成本的考虑,部分超声导航机器人直接基于超声图像和机械臂的位置信息来实现导航功能,这种机器人系统无法直接使用已有的标准来进行测试系统精度,需要结合超声影像的定位,配准,引导的实际需求进行这类医疗机器人的系统精度的设计。
技术实现思路
1、实用新型目的:提供一种医疗机器人精度测试工装,以解决现有技术存在的上述问题。
2、技术方案:一种医疗机器人精度测试工装,包括:
3、固定件,包括直角安装架;
4、其特征在于,还包括:
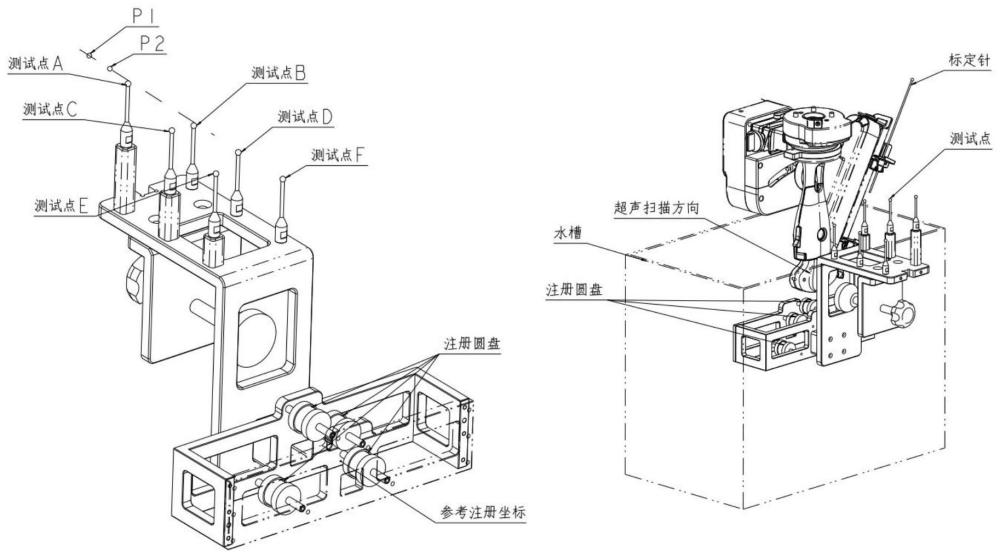
5、配准部,包括安装在所述安装架外侧面上的架体,以及设置在所述架体上的多组注册盘组,每组注册盘组包括与架体连接的两个注册圆盘;
6、测试部,包括设置在所述安装架外顶面上的多组测试组,每组测试组包括两个测试立柱,每个测试立柱包括与所述安装架活动连接的测试支柱,以及设置在所述测试支柱上的测试球体。
7、所述测试立柱可以卡扣式插接在安装架上,也可以为螺纹式旋入,当为螺纹式旋入时,测试立柱底部及安装架上均开有螺纹。
8、所述测试球体为高精度的刚性小球,测试支柱与测试球体两者之间可以刚性焊接在一起。
9、在工装计量后,该测试球体相对显影测试块位置已知,可以作为验证医疗机器人引导系统的穿刺目标和靶点。测试球体半径大小根据所需测试的医疗器械的系统精度的来决定,如对于系统精度要求为3mm的超声引导的医疗机器人系统,刚性小球的半径可以设定成3mm;支柱和刚性小球可以拆卸,以便适应不同设备的测试需要。
10、本实用新型通过设计测试工装进行给予机器人引导系统进行测试系统精度,通过设计配准部进行注册配准工作,将医疗机器人及工装进行统一坐标系,并通过测试部上设计的测试球体进行校验注册配准后医疗机器人的穿刺介入准度,进而可定量地给出机器人引导系统的精度误差情况。
11、在进一步实施例中,所述两个注册圆盘之间设有显影测试块,显影测试块由超声显影好的材质制成,如硅胶,吉利丁等材料,需要测试块在水中具有良好显影效果,边缘轮廓清晰方便识别。
12、显影测试块的形状可以根据实际需求来确定,设计成圆柱,锥形柱或者其他异形结构;
13、固定件主要起着固定作用,将配准部和测试部牢固地固定在一起,该部分的尺寸需要考虑到使用到的医疗机器人及超声影像的实际宽度,使用固定件不应该在超声影像内显影,以免被误识别,影响测试的效果。
14、在进一步实施例中,测试立柱的高度可以根据实际使用的角度去调整设置;
15、在一具体优选的实施例下,可以将多组测试组中的测试立柱分为两列,一列测试立柱高度不一,另外一列测试立柱高度相同。
16、在进一步实施例中,所述固定件还包括与安装架内顶面连接的固定架,以及与所述固定架螺接的丝杆,所述丝杆的端部具有一固定块。
17、工装固定后,配准部会没入水中,测试部会在水面上,固定件设计为可以调节,进而适应水槽壁的薄厚。
18、有益效果:本实用新型公开了一种医疗机器人精度测试工装,本实用新型通过设计测试工装进行给予机器人引导系统进行测试系统精度,通过设计配准部进行注册配准工作,将医疗机器人及工装进行统一坐标系,并通过测试部上设计的测试球体进行校验注册配准后医疗机器人的穿刺介入准度,进而可定量地给出机器人引导系统的精度误差情况。
技术特征:
1.一种医疗机器人精度测试工装,包括:
2.根据权利要求1所述的一种医疗机器人精度测试工装,其特征是:所述两个注册圆盘之间设有显影测试块。
3.根据权利要求1所述的一种医疗机器人精度测试工装,其特征是:所述固定件还包括与安装架内顶面连接的固定架,以及与所述固定架螺接的丝杆,所述丝杆的端部具有一固定块。
技术总结
本技术公开了一种医疗机器人精度测试工装,所述测试工装包括:固定件,包括直角安装架;配准部,包括安装在所述安装架外侧面上的架体,以及设置在所述架体上的多组注册盘组,每组注册盘组包括与架体连接的两个注册圆盘;测试部,包括设置在所述安装架外顶面上的多组测试组,每组测试组包括两个测试立柱,每个测试立柱包括与所述安装架活动连接的测试支柱,以及设置在所述测试支柱上的测试球体。本技术通过设计测试工装对机器人引导系统进行系统精的度测试,通过设计配准部进行注册配准工作,将医疗机器人及工装进行统一坐标系,并通过测试部上设计的测试球体进行校验注册配准后医疗机器人的穿刺介入准度。
技术研发人员:谢士兵,向华,张超超,方望来,冷文超,陈奎
受保护的技术使用者:北京市医疗器械检验研究院(北京市医用生物防护装备检验研究中心)
技术研发日:20230908
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!